



امروز یکشنبه ۳۰ اردیبهشت ۱۴۰۳
دسته بندی سایت
پیوند ها
آمار بازدید سایت
زندگی پر از سیم شده است. این روزها همه با انواع و اقسام کابل های مختلف سروکار داریم. از انواع کابل USB گرفته تا کابل های مختلف شبکه و انتقال اطلاعات. خیلی وقت ها هم اسم کابل های مورد استفاده را نمیدانیم و فقط از آنها استفاده میکنیم.
سایت گیزمودو یک راهنمای تصویری بسیار جالب برای آشنایی با کابل ها تهیه کرده بود. حیفمان آمد شما آن را نبینید. در این راهنما نه تنها با شکل و کاربرد این کابل ها آشنا میشوید، بلکه اسامی آنها را هم فرا خواهید گرفت. و من تضمین میکنم وقتی نام کابل ها را بدانید در خیلی مواقع به کارتان خواهد آمد.
این یکی معرف حضور همه هست. نام آن USB نوع A است. کابلی که این روزها همه جا دیده میشود. با آمدن آن ارتباطات های پارالل و پورت های سریال منقرض شدند. این مدل کابل در واقع از USB 1 و نوع جدیدتر که USB 2 نام دارد تشکیل شده. USB 2 نسبت به نسخه اول سریع تر است. کابل یو اس بی امکان انتقال اطلاعات و انرژی برای تامین برق مورد نیاز را به صورت همزمان فراهم میکند.
اگر تا به حال کابل بالایی را ندیده اید همین الان از نارنجی خارج شوید و کامپیوتر را خاموش کنید. USB type B این یکی اغلب طرف دیگر یک کابل USB را تشکیل میدهد. و معمولا برای متصل کردن لوازم جانبی کامپیوتر مانند پرینتر و اسکنر استفاده میشود. کابل سوم یو اس بی کوچولو است! که به آن Mini USB گفته میشود. همانطور که از اسم آن مشخص است نسبت به اتصالات قبلی جای کمتری اشغال میکند و برای دستگاه های کوچک مانند اتصال گوشی موبایل یا دوربین دیجیتال استفاده میشود. نوع بعدی مدل فسقلی تری نسبت به یو اس بی کوچولو است. که من ترجیح میدهم آن را «فسقل یو اس بی» صدا کنم! اما نام اصلی آن Micro USB است. و برخی شرکت ها مانند موتورولا و ال جی از آن زیاد استفاده میکنند. IEEE 1394 (aka FireWire) این مدل جایگزینی برای کابل USB محسوب میشود و توسط شرکت اپل به شهرت رسیده است. میبینید اپل همیشه دوست دارد که متمایز باشد! شرکت سونی نام این اتصال را iLink گذاشته است. ممکن است آن را بر روی یک دوربین فیلم برداری دیجیتال و یا یک آی پاد قدیمی ببینید. این اتصال سرعت انتقال اطلاعات بالایی دارد. مدل شش پین این اتصال امکان انتقال انرژی را هم دارد. FireWire 800 نسبت به اتصال قبلی سریع تر است و در سال 2003 معرفی شده است. اما برای اتصال نیاز به کانکتورهای متفاوتی دارد که این کار استفاده آن را محدود کرده است. این یکی کابل مشهوری است. با آقای RJ45 آشنا شوید. ایشان نقش مهمی را در زندگی شبکه ای ما بازی میکنند. البته از وقتی که قیمت مس گران شده این کابل ها هم به شدت گران شده اند. این کابل در بین عموم به نام «کابل شبکه» مشهور است. این کابل به چند دسته بندی تقسیم میشود که مشهورترین آنها شامل Cat5 و Cat6 است. نوع Cat5 امکان انتقال اطلاعات را تا 100 مگابیت در ثانیه را دارد. و نوع Cat6 این امکان را تا 1000 مگابیت افزایش داده است. eSATA اسم این کابل تازگی ها زیاد به گوش میخورد. اگر کامپیوتر رومیزی خود را اخیرا خریده باشید نوع اتصال هارد دیسک شما از نوع SATA است.
این یکی یک حرف e اضافه دارد که مخفف External یا همان خارجی است. این کابل را خارجی ها ساخته اند!؟ نه، منظور این است که این کابل خارج از کیس کامپیوتر استفاده میشود. سرعت انتقال اطلاعات این کابل بیشتر از USB و Firewire است. و معمولا در هارد دیسک های اکسترنال استفاده میشود. لپ تاپ های جدید هم معمولا ورودی این کابل را دارند. HDMI این یکی خیلی مهم است. با آمدن این اتصال فاتحه کابل های S-Video و DVI خوانده شده است. ضمنا اسم با کلاسی هم دارد: High Definition Multimedia Interface و همانطور که از اسمش مشخص است برای انتقال صوت و تصویر HD به کار میرود. تمام گجت های چند رسانه ای در حال مجهز شدن به این نوع اتصال هستند. از لپ تاپ ها گرفته تا تلویزیون های ال سی دی و دوربین های فیلمبرداری دیجیتال. سرعت بالای انتقال اطلاعات تنها خصوصیت مفید این اتصال نیست. این اتصال از مکانیزمی به نام CEC پشتیبانی میکند که امکان کنترل وسایل الکترونیکی را از طریق این پورت فراهم میکند. از طریق این درگاه میتوان به دستگاه مورد نظر فرمان داد. در آینده خواهید دید که این امکان چقدر مورد استفاده خواهد بود. این یکی DVI نام دارد. و همانی است که گفتیم در حال جایگزین شدن با HDMI است. این یک اتصال تصویری است که اغلب برای اتصال مانیتورهای LCD به کامپیوتر استفاده میشود. و ممکن است شما هم یکی از آنها را داشته باشید.
اتصال آخر DisplayPort نام دارد. و برای اتصال بین کامپیوتر و مانیتور طراحی شده. اما هنوز به صورت عمده عرضه نشده است. این کابل علاوه بر سرعت بسیار بالای انتقال اطلاعات از DRM هم پشتیبانی میکند. DRM چیست؟ یک روش محافظت سخت افزاری از کپی رایت صوت و تصویر! میتوانید
"سنسورهای مادون قرمز پسیو" وسایل الکترونیکی هستند که تشعشعات اینفرارد از اجسام و اهداف را در میدان دیدش اندازه گیری می کند. به این سنسورها "سنسورهای PIR" گفته می شود که از مخفف Passive InfraRed sensors گرفته شده است.
PIR ها گاهی برای آشکارسازی اهداف متحرک بکار می روند، به این صورت که منبع انتشار اینفرارد با یک دما، مانند بدن، از جلوی منبع اینفرارد دیگر با دمای دیگر، مانند دیوار عبور می کند و بر اساس این تغییر آشکار سازی صورت می گیرد.
همه اشیاء اینفرارد (مادون قرمز) تشعشع می کنند. این تشعشع از دید انسان نامرئی است ولی می تواند با وسایل الکترونیکی که برای این هدف ساخته شده اند، آشکار شود. عبارت "پسیو" در این سنسور به این معنی است که این سنسور از خود هیچ نوع انرژی ساتع نمی کند، و فقط تشعشعات اینفرارد را از قسمت جلوئی سنسور (Sensor Face) دریافت می کند. در هسته یا مرکز PIR یک یا دسته ای از سنسورهای نیمه هادی وجود دارد، که مساحت تقریبی آن یک چهارم اینچ مربع است. این ناحیه از مواد گرما برقی (pyroelectric) ساخته شده است.
سنسورهای فعلی روی چیپ ها از مواد گرما برقی طبیعی یا مصنوعی و معمولا به صورت یک غشا یا لایه نازک ساخته می شوند. بعضی از ترکیبات عبارتند از: گالیوم نیترید (GaN)، کاسیم نیترات (CsNO3)، پلى وينيل فلوراید، مشتقات فنیل پیرازین و لیتیوم تانتالیک (LiTaO3) که مانند کریستال است و خواص پیرو الکتریک و پیزو الکتریک -ويژگى برخى کريستالها که به هنگام اعمال ولتاژ به انها تحت فشار قرار مى گيرند يا به هنگام قرار گرفتن در معرض فشار مکانيکى يک ولتاژ توليد مى کنند- را با هم دارد.
سنسور PIR اغلب به عنوان قسمتی از مدارات مجتمع ساخته می شود و ممکن است شامل یک، دو، سه یا چهار "پیکسل"، شامل مساحتهای مساوی از مواد گرما برقی باشد. ممکن است سنسورها را به صورت جفتهائی به ورودیهای مخالف تقویت کننده های تفاضلی متصل کنند. در چنین ترکیبی اندازه گیریهای PIR ها یکدیگر را خنثی کرده و در نتیجه اندازه متوسط دمای میدان دید از سیگنال الکتریکی برداشته می شود. این به سنسور اجازه می دهد تا در مقابل آشکارسازی خطا که ناشی از تشعشعات نوری یا روشنائی های بزرگ است، مقاومت کند. نورهای روشن پیوسته می تواند این سنسور را اشباع کرده و باعث می شود تا سنسور نتواند اطلاعات بیشتری را ثبت کند. در عین حال این ترکیب تفاضلی، تداخل مد مشترک را مینیمم می کند که مانع از راه اندازی ناشی از میدانهای الکتریکی نزدیک به وسیله می شود. به هر حال این ترکیب نمی تواند دما را اندازه گیری کند و مختص آشکار سازی اشیاء متحرک است.
آشکارسازهای مبتنی بر سنسورهای PIR
در این آشکار سازها معمولا سنسور PIR روی برد مدار چاپی سوار است که دارای تجهیزاتی برای تفسیر سیگنال دریافتی می باشد. مدار اصلی در محفظه ای قرار دارد که در مکانی قرار می گیرد که در میدان دید سنسور قرار نگیرد. اینفرارد می تواند از پنجره به سنسور برسد چون پلاستیک بکار رفته در آن از دید اینفرارد شفاف است و برای حفاظت سنسور از گرد و غبار و حشرات که باعث پوشاندن میدان دید می شوند، بکار می رود.
مکانیسم کوچکی برای متمرکز کردن انرژی اینفرارد دور دست به سطح سنسور بکار می رود. به این صورت که پنجره فوق الذکر را از لنزهای فشرده شده ای می سازند و گاهی اوقات از آینه های سهموی برای این کار استفاده می کنند. همچنین یک پنجره فیلتر برای محدود کردن طول موج ورودی بین 14-8 میکرومتر قرار می گیرد که مهمترین تشعشعات اینفرارد انسان در آن قرار دارد و قویترین آنها 9/4 میکرومتر است.
وسیله PIR می تواند به عنوان یک دوربین بکار رود که می تواند مقدار انرژی متمرکز شده اینفرارد را به سطح خود در خود برای چند لحظه نگه دارد. یک بار که توان به PIR اعمال شد، انرژی برای چند لحظه در حالت سکون می ماند و می تواند یک رله کوچک را تحریک کند. این رله می تواند دسته ای از اتصالات الکتریکی را کنترل کند که به ورودی هشدار یک آشکار ساز متصل است. اگر انرژی تمرکز شده در طول زمان تغییر کند این وسیله حالت هشدار را تغییر می دهد. این رله معمولا یک رله نرمال بسته (NC) یا فرم B است. برای اطلاعات بیشتر در مورد رله این مقاله را مطالعه نمائید.
یک شخص که وارد میدان دید سنسور شده آشکار می شود در صورتیکه انرژی اینفرارد ارسالی بدن متجاوز با قسمتی از مدار که انرژی محیط قبلی دیده شده توسط سنسور را از محیط حفاظت شده را دارد، تداخل پیدا کند. حالا این بخش از چیپ نسبت به وقتیکه شخص وجود نداشت گرمتر شده است. حال اگر متجاوز حرکت کند یک نقطه داغ را روی سطح سنسور توسط آینه متمرکز کننده جابجا می کند. این حرکت انرژی رله را تخلیه و اتصال هشدار را برقرار می کند. به طور عکس اگر شخص سعی کند با گرفتن یک عایق حرارتی از روبروی سنسور عبور کند، یک نقطه سرد را روی سطح سنسور جابجا کرده و انرژی رله را تخلیه و هشدار را فعال می کند. تنها راه این است که عایق همدما با میدان دید قبلی سنسور باشد.
سازندگان این سنسور پیشنهادات زیادی برای مکان نصب درست، برای جلوگیری از هشدار اشتباه دارند. آنها پیشنهاد می دهند که سنسور PIR را در مسیری که از شیشه دیده شود قرار ندهید. اگر چه طول موجهای حساس دستگاه از شیشه به راحتی نفوذ نمی کنند، ولی منابع اینفرارد قوی مانند موتور ماشینها یا بازتاب نور آفتاب می توانند با گول زدن دستگاه، هشدار اشتباه (بدون متجاوز) را فعال کنند. البته شخصی که بتواند از پشت سنسور عبور کند نیز نمی تواند آشکار شود.
همچنین توصیه شده که سنسور PIR در نزدیکی کانالهای هوا قرار نگیرد. زیرا با اینکه تشعشع اینفرارد هوا بسیار کم است ولی با خنک شدن پلاستیک محافظ و یا لنز می توانند به عنوان هدف خنک تلقی شده و هشدار را اشتباها فعال نمایند.
سنسورهای PIR با ترکیبات مختلف کاربردهای فراوانی دارد. اکثر کاربرد این سنسور در سیستمهای حفاظتی خانه است و رنجی در حدود 10 متر دارند. بعضی PIR های بزرگتر با یک آینه می توانند تغییرات اینفرارد را در 30 متری یا بیشتر حس کنند. همچنین PIR هائی وجود دارند که با آینه های چند جهتی می توانند میدان دید عریض تری در حدود 110 درجه یا برعکس باند باریک را حس کنند.
کنترل کننده های از راه دور حرارتی مبتنی بر سنسورهای PIR
طراحان از خاصیت اندازه گیری از راه دور سنسورهای PIR استفاده کرده و با استفاده از خروجی "غیر تفاضلی" سنسور برای کنترل حرارت استفاده می کنند. سیگنال خروجی با سیگنال کالیبره شده بر اساس جنس و حرارت دیده شده توسط سنسور، مقایسه می شود. بدون کالیبراسیون PIR فقط می تواند تغییرات دمائی را به ما نشان دهد و نمی تواند دمای حقیقی آن را به ما بدهد.





مقدمه
حتما شما تا حالا ماشین حساب هایی که باتری خورشیدی دارند رو دیدید. ماشین حسابهایی که هیچ وقت نیازی به باتری ندارند. یا حتی بعضی هاشون اصلا کلید خاموش ندارند. تا وقتی که نور کافی داشته باشند کار می کنند. شاید صفحه های خورشیدی بزرگتری رو در جاده ها، چراغ های راهنمایی یا حتی در پارکینگها برای روشن کردن لامپها دیده باشید. هرچند این موارد مثل ماشین حسابهای خورشیدی معمول نیستند؛ اونها اون بیرون هستند و اگر بدونید کجا رو باید نگاه کنید پیدا کردنشون زیاد سخت نیست. ماهواره ها هم برای انرژی سیستم هاشون از آنتنهای باتری خورشیدی استفاده می کنند.
شاید شما در مورد انقلاب خورشیدی در چند سال اخیر شنیده باشید. این ایده که یک روز همه ما بتونیم انرژی مجانی از خورشید بگیریم. جالبه بدونید که در یک روز روشن و آفتابی، خورشید با درخشیدنش به هرمتر مربع از زمین تقریبا 1000 وات انرژی میدهد. و اگر می تونستیم همه این انرژی رو جمع آوری کنیم می تونستیم انرژی خونه و محل کارمون رو تامین کنیم.
در این مقاله سلول خورشیدی رو بررسی کردیم تا ببینیم چطور انرژی خورشید رو به الکتریسیته تبدیل می کنند. در این فرایند خواهید آموخت که چرا هر روز به استفاده از انرژی خورشید نزدیک می شویم. و اینکه چرا هنوز به پژوهش زیادی نیاز داریم تا این فرایند به صرفه باشد.
سلول خورشیدی: تبدیل فوتون به الکترون
سلولهای خورشیدی که روی ماشین حساب ها و ماهواره ها دیده میشوند photovoltaic cell یا module هستند. Module ها گروهی از سلول های خورشیدی هستند که به طور الکتریکی به هم متصل شده اند. Photovoltaic همان گونه که از اسمش پیداست (photo یعنی نور و voltaic یعنی الکتریکی) یعنی نور خورشید را یکراست به برق تبدیل می کند. قبلا سلول خورشیدی مخصوص فضا ساخته می شد. اما آنها می تونند بسیار بیشتر در جاهای نزدیکتری به کار روند. آنها حتی می تونند انرژی خانه های ما رو تامین کنند. اما این دستگاهها چطور کار می کنند؟
سلولهای خورشیدی (photovoltaic (PV) cells) از مواد خاصی به نام نیمه هادی ساخته می شوند. مانند سیلیکون که به تازگی بسیار مورد استفاده قرار گرفته. وقتی نور به سلول برخورد می کند مقدار خاصی از آن به نیمه هادی جذب می شود. و این بدان معنی است که انرژی نور جذب شده به نیمه هادی منتقل شده. انرژی به الکترونها ضربه زده، آنها را از بند آزاد می کند و کمک می کند آنها آزادانه جریان پیدا کنند. همه سلولهای خورشیدی همچنین یک یا چند میدان الکتریکی دارند که الکترونهای آزاد را مجبور می کنند تا به وسیله نور جذب شده در راستای خاصی به حرکت در آیند. حرکت الکترونها همان جریان الکتریکی است که می توان دو فلز در دو سر سلول قرار داد و جریان آن را به خارج هدایت کرد. برای نمونه از این انرژی در ماشین حساب استفاده می شود. این جریان همراه با ولتاژ سلول (که نتیجه میدان یا میدانهای سلول است) انرژی (یا wattage) سلول را تعریف می کند.
این فقط فرایند پایه ای سلول خورشیدی بود. اما چیزهای خیلی بیشتری در مورد آن وجود دارد. بهتر است نگاه عمیق تری به یک نمونه از سلول خورشیدی بیندازیم: سلول خورشیدی تک بلور سیلیکون.
سیلیکون چگونه سلول خورشیدی را می سازد؟
سیلیکون ساختمان شیمیایی خاصی دارد. خصوصا در حالت بلور. یک اتم سیلیکون دارای 14 الکترون است که در سه پوسته مجزا چیده شده اند. پوسته بیرونی آن که تازه تا نیمه پر شده تنها 4 الکترون دارد. اتم سیلیکون همواره به دنبال راهی است که پوسته بیرونی را پر کند (که دوست دارد هشت الکترون داشته باشد.). برای همین الکترونهی خود را با 4 الکترون اتم کناری به اشتراک می گذارد. مانند آین که هر اتم سیلیکون دست همسایه خود را گرفته باشد. اما با این تفاوت که هر اتم باچهار دست، دست چهار همسایه خود را گرفته. بدین ترتیب ساختمان بلوری سیلیکون ساخته می شود. و این ساختمان برای این نوع سلول خورشیدی لازم است.
ما بلور خالص سیلیکون رو شرح دادیم. سیلیکون خالص رسانای ضعیفی برای جریان الکتریکی است. چون هیچ یک از الکترونهای آن برای حرکت آزادی ندارند. در حالی که در یک رسانای خوب مانند مس الکترون های آزاد جران را به خوبی انتقال می دهند. و به عکس در ساختمان بلوری الکترونها در جای خود قفل شده اند. سیلیکون در سلول خورشیدی اندکی اصلاح شده و به صورت سلول خورشیدی عمل می کند.
در سلول خورشیدی سیلیکون را با ناخالص به کار برده اند. یعنی اتمهای دیگر به سیلیکون وارد شده و عملکرد ماده را اندکی تغییر داده اند. ما همواره تصور می کنیم که نا خالصیها مضرند. اما در این مورد سلول بدون آنها کار نمی کند. این نا خالصیها واقعا هدفدار ایجاد می شوند. تصور کنید سیلیکون با یک اتم فسفر، یک اتن در برابر یک میلیون انتم سیلیکون. فسفر در لایه بیرونی خود 5 الکترون دارد، نه 4 تا. این اتم همچنان به اتمهای سیلیکون همسایه چسبیده با یک الکترون که کسی نیست دستش را بگیرد. این الکترون در همبندی شرکت ندارد اما یک پروتون مثبت در هسته فسفر آن را در اطراف خود نگاه می دارد.
وقتی انرژی به سیلیکون خالص اضافه می شود، (مثلا به صورت گرما) ممکن است تعداد اندکی از الکترونها را از بند پیوند آزاد کند و الکترونها اتم را رها می کنند. یک سوراخ در جای آنها باقی می ماند. الکترونهای آزاد شده سرگردان و پریشان در شبکه بلوری به دنبال سوراخ دیگری می روند تا درونش بپرند. به این الکترونها حاملهای منفی می گویند و می تونند جریان الکتریکی را منتقل کنند. تعداد اینها اندک است و زیاد هم بدرد خور نیستند. سیلیکونهایی که با فسفر خالص شده اند داستان دیگری دارند. الکترونهای فسفر در این شبکه نیاز به انرژی بسیار اندکی برای رها شدن دارند زیرا در پیوند شرکت ندارند. همسایهاشان آنها را بر نمی گردانند. در این صورت ما تعداد زیادتری حامل منفی نسبت به سیلیکون خالص خواهیم داشت. فرایند اضافه کردن ناخالصی را دوپه کردن می گویند و وقتی سیلیکون با فسفر دوپه شود به خاطر زیاد بودن حامل های منفی نوع N (Negative) نامیده می شود. سیلیکون دوپه شده نوع N بسیار بیشتر از سیلیکون خالص رسانایی دارد.
در حقیقت فقط قسمتی از سلول خورشیدی ما نوع N است. قسمت دیگر سیلیکون دوپه شده با بور است. بور در پوسته خارجی خود به جای 4 الکترون 3 الکترون دارد. به این صورت نوع P ساخته می شود. در سیلیکون نوع P (Positive) به جای الکترون آزاد، سوراخ آزاد دارد. سوراخ یعنی خالی از الکترون. اینها حاملهای مثبت هستند. این سوراخها مانند الکترونهای آزاد حرکت می کنند.
داستان زمانی جالب می شود که سیلیکون نوع N را با سیلیکون نوع P کنار هم قرار دهیم. به یاد داشته باشید که هر سلول خورشیدی حد اقل یک میدان الکتریکی دارد. بدون این میدان الکتریکی سلول خورشیدی کار نخواهد کرد و این میدان زمانی تشکیل می شود که سیلیکون نوع N و سیلیکون نوع P با هم در ارتباط باشند. پس ناگهان الکترونهایی که به دنبال سوراخ می گشتند سوراخهای سیلیکون نوع P را می بینند و دیوانه وار به درون سوراخها می پرند و آنها را پر می کنند.
آناتومی سلول خورشیدی
تاکنون سیلیکون ما از نظر الکتریکی خنثی بود. الکترونهای اضافی فسفر با پروتونهای اضافی متعادل شدند. سوراخها با نبود الکترون متعادل شدند. وقتی الکترونها و سوراخها در پیوندگاه با هم مخلوط می شوند آیا همه الکترونها همه سوراخها را پر می کنند؟ نه. اگر این اتفاق می افتاد این شکل گیری دیگر به درد ما نمی خورد. سوراخها و الکترونها همین طور که مخلوط می شوند، درست در پیوندگاه یک سد می سازند و عبور الکترونها را از نوع N به نوع P سخت تر و سخت تر می کنند. سرانجام تعادل برقرار گشته و یک میدان الکتریکی دو طرف را از هم جدا می سازد.
تاثیر میدان الکتریکی در سلول PV
این میدان الکتریکی مانند دیود عمل می کند. اجازه می دهد الکترونها از نوع P به نوع N حرکت کنند (و حتی حل می دهد). این مانند یک تپه است که الکترونها می توانند از آن به پایین بیایند ولی منی توانند از آن (به طرف نوع N) بالا روند.
پس ما یک میدان الکتریکی داریم که به صورت یک دیود عمل کرده و الکترونها فقط می توانند در یک جهت در آن حرکت کنند.
وقتی نور، به شکل فوتون، به سلول ما ضربه می زند، انرژی آن تیم الکترون-سوراخ ما را آزاد می کند. هر فوتون به طور طبیعی دقیقا یک الکترون را آزاد می کند و در نتیجه یک سوراخ ساخته می شود. اگر این اتفاق به اندازه کافی نزدیک میدان الکتریکی بیفتد، یا الکترون آزاد یا سوراخ آزاد در محدوده میدان بوجود آمده و سرگردان شوند، میدان الکترونها را به سمت نوع N و سوراخها را به سمت نوع P می فرستد. بدین ترتیب خنثایی از بین می رود و اگر ما یک پل جریان در خارج ایجاد کنیم، الکترونها به سمت مکان اولیه خود می روند تا با سوراخهایی ترکیب شوند که میدان از آنها دورشان کرده و در طی این مسیر برای ما کار انجام می دهند. حرکت الکترونها جریان را پدید آورده و میدان الکتریکی ولتاژ را. با وجود جریان و اختلاف پتانسیل ما انرژی خواهیم داشت که نتیجه آندوست.
اما هنوز تعداد اندکی پله تا رسیدن به سلول خورشیدی باقی است. سیلیکون موجب درخشش ماده و همچنین موجب بازتاب نور می شود. فوتونهای بازتاب شده برای سلول قابل استفاده نیستند. برای همین با یک پوشش ضد بازتاب (Antireflective) اتلاف انرژی ناشی از بازتای را به کمتر از 5 درصد کاهش می دهیم. مرحله آخر قرار دادن پوشش شیشه ای است که سلول را در مقابل عوامل محیطی محافظت می کند. Module های PV از چندین سلول تشکیل شده اند که به صورت موازی با هم مرتبط شده اند و در یک قاب محکم شده و در دو سر آنها قطبهای مثبت و منفی قرار دارد.
ساختمان کلی سلول PV سیلیکون
سلول ما چقدر از انرژی را جذب می کند؟ بدبختانه بیشترین میزان انرژی که یک سلول می تواند جذب کند تنها 25 درصد و حتی در بیشتر موارد کمتر از 15 درصد است. اما چرا اینقدر کم...؟
منبع ترجمه:
در اين مقاله كاربر نيمه هادي هاي قدرت در سيستمهاي كنترل سرعت از نوع ايستا يا استاتيكي هستند . بايد دانست كه تركيب سيستمهاي الكترونيك قدرت (مانند كنترل كننده هاي ولتاژ ) و متوتورهاي الكتريكي همراه با مكانيسم كنترل آنها را محركهاي تنظيم پذير سرعت مي نامند كه ما به اختصار آنرا ASD مي ناميم . در حقيقت اين محرك ها قابل تنظيم بوده و براي كنترل سرعت يا كنترل دور موتورهاي الكتريكي مورد استفاده قرار مي گيرند .
(Adjustable Speed Drive)
محركهاي تنظيم پذير سرعت (ASD) براي كنترل سرعت موتورهاي القائي از نقطه نظر كاربرد به سه دسته تقسيم مي شوند:
1- ASD از نوع ولتاژ متغيير و فركانس ثابت
كنترل در اينگونه سيستمها دامنه ولتاژ اعمالي به استاتور كنترل مي شود . براي اين مقصود از كننده ولتاژ در سر راه موتور استفاده شده است . اين نوع محرك ها در سطوح قدرت متوسط و پايين مورد استفاده قرار مي گيرند . براي مثال مي توان از بادبزن هاي نسبتاً بزرگ يا پمپ ها نام برد . در اين روش ولتاژ استاتور را مي توان بين صفر و ولتاژ اسمي در محدوده زاويه آتش بين صفر تا 120 درجه تنظيم و كنترل نمود . اين سيستم بسيار ساده بوده و براي موتورهاي القائي قفس سنجابي كلاس D با لغزش نسبتاً بالا( 10 تا 15 درصد ) مقرون به صرفه است . عملكرد اين محركها زياد جالب توجه نيست .
2- ASD از نوع ولتاژ و فركانس متغيير
اگر منبع تغذيه استاتور از نوع فركانس متغيير انتخاب شود ، عملكرد محرك هاي تنظيم پذير سرعت (ASD) بهبود مي يابد . بايد دانست كه شار در فاصله هوايي متورهاي القائي با ولتاژ اعمالي به استاتور متناسب بوده وبا فركانس منبع تغذيه نسبت عكس دارد . بنابراين اگر فركانس را كم كنيم تا كنترل سرعت در زير سرعت سنكرون امكان پذير گردد و ولتاژ را معادل ولتاژ اسمي ثابت نگه داريم ، در اين صورت شار فاصله هوايي زياد مي شود . براي جلوگيري از بوقوع پيوستن اشباع بخاطر افزايش شار ، ASD از
نوع فركانس متغيير بايد از نوع ولتاژ متغيير نيز باشد تا بتوان شار فاصله هوايي را در حد قابل قبولي نگه داشت ، معمولا به اين سيستم كنترل ، سيستم كنترل V/F ثابت نيز گفته مي شود . يعني اگر فركانس را كم كرديم بايد ولتاژ را طوري كم كنيم كه شار در فاصله هوايي در حد اسمي خود باقي بماند . از اين سيستم براي كنترل سرعت موتورهاي قفس سنجابي كلاسهاي A، B ،C، D استفاده مي شود .
3-ASD كه بر اساس بازيافت توان لغزشي كار مي كند
در اين سيستمها با استفاده از مدارهاي نيمه هادي قدرت كه به پايانه رتور وصل مي شوند ، بازيافت توان( يا توان برگشتي) در فركانس لغزشي به خط تغذيه موتور منتقل مي گردد . بايد دانست فركانس لغزشي از حاصلضرب فركانس منبع و لغزش موتور بدست مي آيد. بطور كلي در اين طرح بر روي مدار رتور كنترل خواهيم داشت . در اينجا متذكر مي شويم كه ASD از نوع فركانس متغيير بر دو نوع است :
الف : طرح هاي حاوي ارتباط DC (جريان مستقيم)
ب : سيكلو كنورتورها
در طرح هاي حاوي ارتباط DC منبع تغذيه AC توسط يكسوساز ، يكسو شده و سپس توسط اينورتر مجدداً به منبع AC دست مي يابيم . اينورتر ها بر دو نوع اند :
1= اينورترهاي تغذيه ولتاژ (اينورترهاي ولتاژ )
2= اينورترهاي تغذيه جريان ( اينورترهاي جريان )
در اينورترهاي ولتاژ ، متغيير تحت كنترل همان ولتاژ و فركانس اعمالي به استاتور است . در اينورترهاي جريان بر دامنه جريان وفركانس استاتور كنترل داريم . اينورترهاي ولتاژ بر دو نوع اند :
1=اينورترهاي با موج مربعي
2= اينورترهاي با مدولاسيون عرض يا پهناي پالس (PWM) .
1- تركيب اساسي مبدلها
سرعت يك موتور القائي توسط سرعت سنكرون ولغزش رتور تعيين مي گردد . سرعت سنكرون بستگي به فركانس تغذيه دارد و لغزش را مي توان با تنظيم ولتاژ و جريان اعمالي به موتور تغيير داد . به طور كلي روشهاي كنترل دور موتورهاي القائي را مي توان بصورت زير تقسيم بندي نمود :
1- ولتاژ متغيير ، فركانس ثابت 2- ولتاژ وفركانس متغيير
3- جريان و فركانس متغيير 4- تنظيم قدرت لغزشي
به منظور ايجاد ولتاژ و فركانس متغيير مطابق شكل (1-a) از مبدلهاي ولتاژ استفاده مي گردد كه توسط يك منبع ولتاژ dc توليد شكل موج مستطيلي ولتاژ در سمت ac مي نمايند كه دامنه آن مستقل از بار بوده و به همين دليل اينورتر هاي منبع ولتاژ نام دارند . براي ايجاد جريان وفركانس متغيير مطابق شكل (1-b) از مبدلهاي جريان استفاده مي گردد كه توسط يك منبع جريان dc توليد شكل موج مستطيلي جريان در سمت ac مي نمايند ، كه دامنه آن مستقل از بار بوده و بنابراين اينورترهاي منبع جريان نام دارند . منبع جريان كنترل شده در ورودي اينورتر توسط يكسو ساز تريستوري ايجاد مي گردد كه با كنترل جريان توسط حلقه فيدبك جريان وسلف بزرگ صافي در خروجي آن ويژگيهاي يك منبع جريان را پيدا مي كند . مبدل موجود در سمت موتور جريان مستقيم را تبديل به جريان سه فاز با فركانس قابل تنظيم مي نمايد . سلف بزرگ موجود در حلقه dc سبب صاف نمودن جريان مي گردد . سيستم رانش اينورتر منبع جريان مناسب براي عملكرد در حالت تك موتوره مي باشد و داراي قابليت بازگشت انرژي به شبكه ac ميباشد . جريان اينورتر توسط حلقه فيدبك جريان كنترل شده و اضافه جريانهاي گذرا توسط تنظيم كننده جريان و سلف صافي حذف مي گردند و بدين وسيله مجموعه داراي قابليت استحكام و اطمينان مناسب براي كاربردهاي صنعتي مي گردد سلف بزرگ سري صافي نرخ افزايش جريان خطا را در هنگام كموتاسيون نا موفق در اينورتر و يا اتصال كوتاه در ترمينالهاي خروجي محدود مي نمايد با حذف سيگنالهاي فرمان گيت تريستورهاي يكسو ساز مي توان بدون از بين
رفتن فيوزها و آسيب رسيدن به اينورتر ، تنها با از دست دادن لحظه اي گشتاور خطا را از بين برد .
2- مدار قدرت اينورتر منبع جريان
به منظور ايجاد منبع جريان متغيير dc سيگنال بيانگر جريان تنظيم شده با جريان واقعي مقايسه شده ، خطاي حاصل تقويت و برا ي كنترل زاويه آتش تريستورهاي يكسو ساز استفاده مي گردد تا جريان مورد نياز در خروجي ايجاد گردد . شكل (2-a) اينورتر پل سه فاز ASCI را نشان مي دهد كه يك موتور القائي با اتصال ستاره را تغذيه مي نمايد . تريستورهاي TH1 الي TH6 به ترتيب روشن شدن شماره گذاري شده اند و هر يك به اندازه يك سوم پريود خروجي هدايت ميكنند . روشن نمودن يك تريستور سبب قطع تريستور هادي فاز مجاور مي گردد . دو بانك خازي كه بصورت مثلث ، متصل مي باشند انرژي مورد نياز براي كموتاسيون ذخيره كرده و ديودهاي D1 الي D6 خازنها را از بار ايزوله مي نمايند . ترتيب هدايت تريستورهاي اينورتر به گونه اي است كه جريانهاي DC تنظيم شده از دو تريستور يكي متصل به خط مثبت وديگري متصل به خط منفي تغذيه عبور مي نمايد . در هر نيم سيكل به مدت 60o هر دو تريستور واقع بر يك بازو قطع بوده بنابراين جريان خط برابر صفر مي باشد . مزيت عمده اينورتر منبع جريان سادگي مدار لازم براي كموتاسيون تريستورها مي باشد . مدار كموتاسيون تنها شامل خازنها و ديودها بوده و به دليل حذف سلفهاي كموتاسيون ، فركانس عملكرد افزايش يافته نويز صوتي كاهش مي يابد . خازن كموتاسيون به گونه اي طراحي مي شود كه ولتاژ معكوس اعمالي بر تريستور ها محدود گردد تا باعث ايجاد زمان خاموشي لازم گردد. به همين دليل زمان خاموشي در دسترس به اندازه كافي زياد مي باشد تا بتوان از تريستور هاي غير سريع يكسوسازي استفاده نمود، كه اين امر اينورتر منبع جريان را در قدرت هاي متوسط به بالا بسيار اقتصادي مي سازد . سيكل كموتاسيون را مي توان به چهار پريود زماني تقسيم نمود:
شكل (2-a) شرايط اينورتر را قبل از آتش شدن TH1در فاصله زماني 1 نشان مي دهد .فرض براين است كه TH1 و TH2 هادي بوده و مطابق شكل جريان خروجي يكسوساز كنترل شده از طريق TH1،D1، فاز A موتور ، فازC موتور ، D2 ، TH2 ، جاري مي گردد . خازن هاي C1 ،C3 ،C5 به ترتيب به اندازه V0، 0 ، -V0شارژ شده اند در فاصله زماني2 با آتش شدن TH3 ، TH1 توسط C1 در باياس معكوس قرار گرفته و خاموش مي گردد .جريان مطابق شكل (2-b) در مسير TH3، بانك خازني متشكل از C1 موازي با تركيب سري C3 ،C5 و D1 جاري ميگردد و به صورت خطي بانك خازني راشارژ مي نمايد . TH1 تا زماني كه ولتاژ خازن C1تغيير پلاريته دهد در باياس معكوس قرار دارد. ديود D3نيز در باياس معكوس بوده و جريانهاي فاز موتور داراي مقادير مشابه حالت قبل مي باشد . در فاصله زماني 3 با هدايت ديود D3 مسير جريان مطابق شكل(2-c) مي باشد. جريان مدار LC منتجه ، جريان فاز A را به صفر كشانده و جريان فاز B را از صفر به Id افزايش مي دهد ، سپس D1 قطع شده و سيكل كموتاسيون تكميل مي گردد . در فاصله زماني 4 جريان منبع از طريق تريستور هاي TH2 و TH3 مطابق شكل (2-d) فازهاي B و C متور را تغذيه مي نمايد . اين شرايط تا لحظه فرمان TH4 به منظور انجام كموتاسيون بعدي حفظ مي گردد . به دليل اينكه D3 تنها ديد هادي در نيمه بالا مي باشد خازن هاي بالايي تاكموتاسيون بعدي ولتاژ خود را ثابت نگه مي دارند . شكل (3) شكل موج ولتاژ خازن كموتاسيون C1 را همزمان با ولتاژ دو سر تريستور نمايش مي دهد.
هنگامي كه اينورتر منبع جريان يك بار الكتريكي را تغذيه مي نمايد ، شكل موج ولتاژ توسط پاسخ بار به جريان اعمالي تعيين مي گردد . رابطه ولتاژ- جريان يك سلف به صورت V=L di / dt بوده كه در آن di/dt نرخ تغييرات جريان مي باشد . بنابراين شكل موجهاي ايده ال جريان در عمل انكار پذير نيستند زيرا تغيير پله اي لحظه اي جريان سبب ايجاد پرش ولتاژ با دامنه نا محدود خواهد گرديد . در مدارات عملي نرخ
تغييرات جريان براي محدود نمودن حداكثر ولتاژ در حد تحمل تريستورها محدود مي گردد . مدت زمان كموتاسيون كه در طول آن جريان بار از يك فاز به فاز ديگر منتقل مي گردد بايستي به حد كافي طولاني باشد تا نرخ تغييرات جريان در حد قابل قبولي كاهش يابد اين محدوديت در مورد اينورترهاي منبع ولتاژ مطرح نمي گردد چرا كه در اين مورد ديودهاي فيدبك مسيري را براي جريان بار القائي ايجاد مي نمايند كه باعث شارژ خازن حلقه dc گشته ، از قطع ناگهاني جريان بار جلوگيري كرده و ولتاژ خروجي اينورتر را محدود مي نمايند . اما در مورد اينورتر منبع جريان به دليل عدم وجود ديودهاي فيدبك ، مسيري براي جريان معكوس وجود نداشته و مدت زمان كموتاسيون را مي توان به قيمت افزايش ضربه هاي ولتاژ اعمالي بر ادوات نيمه هادي قدرت اينورتر كاهش داد .
شكل (4) شكل موج جريان خط و شكل (5) شكل موج ولتاژ خط را براي مدار طراحي شده نشان مي دهد . در مورد موتورهاي القائي ، شكل موج ولتاژ توسط امپدانس معادل بازاء مؤلفه هاي اصلي و هارمونيهاي جريان خروجي اينورتر تعيين ميگردد مطابق شكل (6) ،جريان مستطيل شكل خط از امپدانس استاتور عبور كرده و بين شاخه مغناطيس كننده وشاخه رتور مدار معادل تقسيم مي گردد . امپدانس بالاي شاخه مغناطيس كننده از عبور مؤلفه هاي هارمونيكي جريان خط جلوگيري كرده در نتيجه جريان مغناطيس كننده داراي شكل موج سينوسي با فركانس اصلي خواهد بود . با صرفنظر از اعوجاج كم توليد شده توسط امپدانس Zs ولتاژ ترمينال موتور به صورت سينوسي بههمراه پرشهاي ولتاژي مي باشد كه در ابتدا و انتهاي شكل موج جريان بر روي آن سوار مي گردند . تريستورها و ديودهاي اينورتر بايستي در برابر اين پرش هاي ناگهاني ولتاژ حفاظت شوند . دامنه جريان توسط يكسوساز كنترل شده تعيين و ولتاژ متوسط ورودي اينورتر با ميزان توان مورد نياز موتور تغيير مي كند بگونه اي كه با صرفنظر از تلفات ،توان ورودي اينورتر با توان خروجي آن برابر است . در حالت بي باري موتور حلقه dc تقريباً صفر بوده در حال كه در بار كامل ولتاژ حلقه dc داراي حداكثر مقدار خواهد بود ، بر خلاف اينورتر منبع ولتاژ ورودي ثابت بوده و جريان حلقه dc تابعي از توان مورد نياز موتور مي باشد . به منظور ايجاد ترمز مولدي وبه دليل ثابت بودن جهت جريان مطابق شكل (7) تعويض علامت توان با معكوس نمودن علامت ولتاژ متوسط حلقه dc امكان پذير است . در اين حالت زاويه آتش مبدل كنترل شده بيشتر از90o بوده و مبدل به صورت اينورتر انرژي را به شبكه باز مي گرداند . براي تعويض جهت چرخش موتور مي توان بصورت الكترونيكي توالي زماني اعمال فرمان به گيت تريستورهاي اينورتر را معكوس نموده وبدين ترتيب امكان عملكرد چهار ناحيه اي را مطابق شكل (8) براي سيستم رانش اينورتر منبع جريان ايجاد نمود . مشخصات موتوري كه با جريان ثابت تغذيه مي شود با موتور مشابهي كه با ولتاژ ثابت تغذيه مي شود تفاوتهاي بسياري دارند .شكل (9) منحنيهاي گشتاور – سرعت را در جريانهاي مختلف اما با فركانس ثابت نشان مي دهد . اگر موتور را با جريان نامي (Id=1pu) تغذيه نمائيم ، گشتاور راه اندازي حاصل در مقايسه با موتور تغذيه شده با ولتاژ ثابت بسيار پائين خواهد بود ، زيرا فلوي فاصله هوايي بخاطر امپدانس كم ماشين كم خواهد بود . با افزايش سرعت ماشين ، ولتاژ موتور به خاطر افزايش امپدانس موتور افزايش مي يابد و در نتيجه گشتاور بخاطر افزايش فلوي فاصله هوايي افزايش مي يابد . اگر از اشباع موتور صرفنظر نماييم ، گشتاور به مقدار بالاي نشان داده شده توسط خطوط نقطه چين افزايش مي يابد و سپس با شيب تندي و با سرعت سنكرون به صفر نزول مي كند . اما در عمل اشباع موتور گشتاور توليد شده را محدود مي كند . در شكل منحني گشتاور در شرايط ولتاژ نامي نيز نشان داده شده است ، كه در آن قسمت با شيب منفي را مي توان داراي عملكرد پايدار با فلوي فاصله هوايي نامي دانست . اين منحني ، منحني Id=1pu را در نقطه ي A قطع مي كند . همانطور كه از شكل مشخص است موتور را مي توان در نقاط A يا B با گشتاور يكسان به فعاليت وا داشت . در نقطه B ، جريان رتور كمتر است اما فلوي فاصله ي هوايي مقدار ي بيشتر است وكمي در ناحيه ي اشباع هستيم و در نتيجه تلفات آهني
وتلفات ناشي از پالسي شدن گشتاور افزايش مي يابد . مي توان گفت تلفات مسي استاتور در نقاط A وb يكسان است ، با وجود اينكه تلفات مسي در نقطه ي A كمي بيشتر است . از آنجائيكه نقطه ي A مربوط به عملكرد يك اينورتر منبع ولتاژ در جريان وفلوي فاصله هوايي نامي مي باشد ، عملكرد در نقطه A ترجيح داده مي شود . اما از آنجائيكه A روي قسمت ناپايدار منحني يعني شيب مثبت قرار دارد ، نمي توان موتور را بصورت حلقه باز كنترل نمود و حتماً بايستي فيدبك برقرار بوده و كنترل حلقه بسته باشد . گشتاور بازاء فلوي نامي را مي توان با تغيير جريان و لغزش تغيير داد و اين تغييرات بايد بگونه اي باشد كه همواره روي قسمت شيب منفي منحني معادل گشتاور مربوط به ولتاژ نامي باشد. نقاط كار مختلف روي منحني هاي گشتاور- سرعت را ، كه ممكن است در ناحيه گشتاور ثابت يا قدرت ثابت قرار گيرند ، مي توان توسط يك تغذيه با جريان فركانس متغيير ايجاد نمود.
4- مدار كنترل فاز رتور
از شكل (6) مي توان جريان مغناطيس كننده را بر حسب جريان خط بدست آورد:
(1) A
بدليل وجود منبع جريان، Ia ثابت بوده و اگر فركانس لغزش ، Wr ، را ثابت نگه داريم ، Ima نيز ثابت باقي مي ماند اگر مقدار Ima مشخص باشد ، مقدار Wr را مي توان بازاءجريان Ia بدست آورد . اما اگر بخواهيم Ima راثابت نگه داريم در حاليكه تغييرات Ia ناشي از تغيير بار روي موتور موجود باشد ، بايستي Wr را نيز تغيير دهيم و اگر بخواهيم Ima بازاءتمام بارها و سرعتها ثابت باقي بماند، Wr را بايد بصورت تابعي از Ia كنترل نماييم كه اين موضوع سيستم كنترل را بسيار پيچيده مي سازد . راه حل ديگر اين است كه Wr را ثابت نگه داشته كه در اين صورت Ima متغيير بوده و موتور بازاء جريانهاي كمتر از نامي در حالت تضعيف ميدان و بازاء جريانهاي بالاتر از نامي در مدت زمان بسيار كم در حالت اشباع عمل خواهد نمود . بنابراين به نظر مي
رسد كه بهتر است Wr براي جريان خط ، Ia ، بيش از مقدار نامي در نظر گرفته شود كه اين مقدار اضافي بايستي توسط طراح با توجه به بررسي منحني اشباع موتور تعيين گردد .
شكل (10) بلوك دياگرام سيستم طراحي شده به منظور كنترل فركانس رتور را نشان مي دهد . rΩ فركانس انتخابي رتور و mΩ سرعت مطلوب موتور مي باشد . خروجي مولد نقطه تنظيم جريان"current setpoint generator " سيگنال KTR IREF مي باشد كه در آن KTR تابع تبديل مبدل جريان ورودي اينورتر است . اين سيگنال بازاء ورودي صفر داراي يك حداقل و بازاء وروديهاي مثبت و منفي داراي مقدار مثبتي است . ابتدا ماشين در حال سكون رض مي شود . با روشن نمودن تغذيه در حاليكه سيگنال فرمانm=0Ω مي باشد ، سيگنال rΩ به مدار اعمال مي گردد . خروجي بلوك تعيين كننده علامت +1 است وضرب كننده M1 سيگنال مثبت rΩKT را به ورودي جمع كننده فركانس اعمال مي نمايد . از آنجائيكه Wm برابر صفر است ، سيگنال rΩKT به مدار لاجيك اينورتر اعمال مي گردد ، كه سيگنال گيت تريستورهاي اينورتر را در فركانس rΩ = Wsتوليد مي نمايد . ورودي بلوك مولد نقطه تنظيم جريان صفر است وبنابراين خروجي آن جريان مورد نياز موتور در حال سكون با فركانس rΩ = Ws، را ايجاد مي نمايد . خروجي جمع كننده جريان IS) - KTR( IREFبوده و ضريب كننده M2 آنرا با علامت مثبت به مدار لاجيك يكسوساز اعمال مي نمايد و در نتيجه زاويه آتش α از90o كمتر شده ، ولتاژ كم خروجي منتجه جريان ورودي اينورتر ، Is ، را مي سازد كه متناسب با جريان خط موتور در حال سكون مي باشد)rΩ =. (Ws
با اعمال فرمان سرعت mΩ ، بلوك مولد شيب (Ramp Generator) اين سيگنال را با سرعت افزايش مشخص به ورودي جمع كننده سرعت اعمال مي نمايد . خروجي تعيين كننده علامت در حالت +1 باقي مانده ، خروجي مولد نقطه تنظيم افزايش مي يابد و زاويه آتش α مجدداً به ميزان بيشتري از 90o كاهش مي يابد تا ولتاژ خروجي
يكسوساز افزايش يابد . در نتيجه جريان موتور افزايش يافته ، موتور شتاب گرفته به سرعت mΩ = Wm مي رسد . سيستم در اين حالت در حالت ماندگار فعاليت مي نمايد . به منظور كاهش سرعت با كاهش مقدار mΩ خروجي بلوك مولد شيب كاهش يافته ، ورودي مولد نقطه تنظيم جريان به سمت صفر حركت مي كند . سيگنال KTR IREFبه مقدار حداقل خودرسيده و مجدداً افزايش مي يابد . بدليل منفي بودن سيگنال خطاي سرعت)Wm- mΩ(KT خروجي يكسوساز تغيير علامت مي دهد . در همين زمان ورودي مدار لاجيك اينورتر تبديل به KT[(P/2) Wm-Ωr] مي گردد ، وبنابراين Ws كاهش مي يابد . در نتيجه ماشين در حالت مولدي قرار گرفته و از سرعت آن كاسته مي شود واين عمل تا عملكرد ماندگار mΩ= Wm ادامه مي يابد . شكل (11) نحوه رفتار سيستم در هنگام افزايش تاگهاني بار را نشان مي دهد . تغييرات خطاي دور بسيار نا چيز بوده و به سرعت به حالت ماندگار رسيده است . جريان مرجع Iref نيز با رفتار مشابهي در حالت ماندگار به مقدار بيشتري رسيده تا بتواند با بار اضافي ايجاد شده ، همان سرعت قبلي را ايجاد نمايد . شكل (12) عملكرد سيستم را در كاهش ناگهاني بار نشان مي دهد كه سبب كاهش مقدارIrefو چرخش ناگهاني با سرعت قبلي در حالت ماندگار مي گردد .
شكل (13) بلوك دياگرام مدار كنترل يكسوساز جهت ساخت سيگنال فرمان گيت يكي از تريستورهاي يكسوساز را نشان مي دهد . نمونه ولتاژ خط به بلوك آشكارساز عبور از صفر اعمال شده و نقاط عبور از صفر ولتاژ شبكه آشكار شده و مولد موج دندانه اره اي معكوس را سنكرون با ولتاژشبكه مي نمايد كه ولتاژ كنترل Uc مقايسه شده و در خروجي شكل موج مربعي با پهناي برابر زمان هدايت تريستور را ايجاد مي نمايد و پس از تكيب با قطار پالس فركانس بالا به بلوك تقويت كننده اعمال شده و پس از ايزولاسيون توسط ترانس هسته فريت به گيت – كاتد تريستور اعمال مي گردد. شكل (14) ، پالس هاي اعمالي به گيت تريستور هاي TH1 و TH4 واقع در يك فاز به همراه قطار پالس فركانس بالا را نشان مي دهد . شكل (15) ، بلوك دياگرام مدار
فرمان اينورتر سه فاز پل ASCI را نشان مي دهد. مطابق شكل ولتاژ كنترل ورودي Vf به بلوك اسيلاتور كنترل شونده با ولتاژ اعمال مي گردد ودر خروجي آن شكل موج مربعي با فركانس شش برابر فركانس اينورتر ايجاد مي نمايد . شمارنده حلقوي اين فركانس را بر شش تقسيم كرده وبه تركيب دو به دو خروجي هاي شمارنده حلقوي شكل موج هاي مورد نياز براي اعمال به گيت تريستورهاي اينورتر مطابق شكل (16) به دست مي آيند. براي تعويض جهت چرخش ، با تركيب چند گيت منطقي ترتيب اعمال پالس هاي فرمان تريستور هاي (TH6 ,TH1) و (TH5 , TH3) با يكديگر تعويض مي گردد پس از اين مرحله مشابه مدار يكسوساز مدار تركيب با قطار پالس فركانس بالا ، تقويت و ايزولاسيون را داريم .
یکی از مدارات مورد نیاز برای رباتیک ، تشخیص موانع موجود در پیست میباشد . از طریق مدارات و سنسور های مختلفی میتوان این کار را انجام داد که میتوان به سنسور های آلتراسونیک ، مادون قرمز و … اشاره کرد . البته باید توجه داشت در صورتی که موانع موجود در پیست شما به رنگ مشکی هست و سرعت روبات شما بالا هست بهتر است از مدارات دقیقتر و سنسور دیگری مانند التراسونیک استفاده کنید . در مدار امروز توسط ۳ فرستنده مادون قرمز اشعه مادون قرمز به طرف مانع ارسال میشود و با برخورد اشعه با مانع ، در برگشت به طرف مدار توسط سنسور های گیرنده دریافت میشود و شما میتوانید مانع را تشخیص دهید . مدار زیر نمونه اولیه سنسور تشخیص مانع هست البته برای بهتر شدن و بالا رفتن دقت باید روی این مدار کار کنید به عنوان مثال اگر شما در پالسی که توسط فرستنده ارسال میشود مانند کنترل تلویزیون یک موج مدوله شده ارسال شود خیلی به کیفیت و نحوه عملکرد مدار شما تاثیر خواهد داشت .

یک نمونه مدار ساخته شده فاصله یاب مادون قرمز
البته عکس بالا نمونه اولیه ساخته شده مدار هست اما در ادامه مطلب مدار با ۳ فرستنده مادون قرمز و ۲ گیرنده ۳ پایه مادون قرمز هست . نقشه مدار چاپی و فایل پروتل آن به همراه سورس اصلی برنامه در ادامه مطلب آورده شده است .
در ابتدا یه توضیح مختصری در مورد گیرنده های مادون قرمز ۳ پایه را براتون مینویسم نحوه عملکرد این گونه سنسور گیرنده مادون قرمز به این صورت هست که مانند گیرنده های معمولی در آن یک سنسور مادون قرمز وجود دارد اما توسط یک بخش تقویت کننده سیگنال دریافتی تقویت میشود به صورتی که برد مدار را شما به بالای ۱۰ متر تقویت خواهد کرد .
درضمن این نکته را باید اضافه کنم هر کدام از سنسور های مادون قرمز گیرنده به عنوان مثال سنسور های سری tsop هر کدام فرکانس کاری مشخصی دارند و در صورتی که فرکانس موج فرستنده با فرکانس کاری گیرنده یکسان باشد عکس العمل نشان میدهد پس در ابتدا به دیتا شیت سنسور خریداری شده مراجعه کنید و فرکانس کاری ان را ببینید و مدارتان را طبق آن تنظیم کنید . در قسمت زیر عکس سری سنسور های مادون قرمز ۳ پایه را مشاهده میکنید . درضمن این سنسور ها به چشم پارسی نیز معروف هستند .

نمونه سنسور مادون قرمز ۳ پایه -چشم پارسی
مدار ارئه شده با میکروکنترلر atmega8 و به زبان بیسیک برنامه نویسی شده است .
اگر به عکس زیر دقت کنید میبینید که با یک سنسور فرستنده و گیرنده مادون قرمز نیز این گونه مدارات ساخته شده است و کار میکند اما در پروژه ارائه شده در سایت که جهت دانلود قرار داده شده است با توجه به کاربرد مدار که قبلا طراحی شده از ۳ فرستنده مادون قرمز و ۲ گیرنده مادون قرمز استفاده شده اما اگر فرکانس سنسور های فرستنده را با توجه به فرکانس گیرنده و همچنین به صورت مدوله شده ارسال کنید در کیفیت برد مدار بسیار تاثیر مثبت خواهد داشت .

نمونه مدار ساخته شده
به عنوان مثال یک نقشه عملی از مدار بالا را در عکس زیر ملاحظه میکنید .

یک نمونه مدار عملی
امیداورم که از این مدار کمال استفاده را ببرید. ![]() رمز فایل : www.amper.ir
رمز فایل : www.amper.ir
جهت دانلود فایل نقشه مدار چاپی و سورس مدار سنسور فاصله یاب مادون قرمز بر روی عکس زیر کلیک
نمائید.
منبع: www.amper.ir
نمی دونم تا حالا به عملکرد چشمی های دزدگیر منازل که با مشاهده حرکت انسان دزدگیر را فعال می کنند و یا به دربهای اتوماتیک بانک ها که به هنگام ورود و خروج اشخاص به شکل اتوماتیک باز و بسته میشوند توجهی داشته اید یا نه ... ممکن هست که اصول و مبنای عملکرد این سنسورها برای شما هم مثل من دقیقا ً مشخص نباشد ولی اگر این مقاله را مطالعه نمایید نوع عملکرد این سنسورها کاملا ً برایتان روشن خواهد شد .
همانطور که میدانید امروزه استفاده از سنسور های تشخیص حرکت رونق بسیار بالایی پیدا کرده ، هم در زمینه های امنیتی و حفاظتی و هم در مسائل صرفه جویی و بهینه سازی ،...

سنسور تشخیص حرکت بدن انسان PIR
همانطور که میدانید امروزه استفاده از سنسور های تشخیص حرکت رونق بسیار بالایی پیدا کرده ، هم
در زمینه های امنیتی و حفاظتی و هم در مسائل صرفه جویی و بهینه سازی ، سنسور های PIR یا
PASSIVE INFRA RED سنسورهایی هستند که طول موج Infrared محیط اطراف را دریافت میکنند . در
همین زمینه مطالبی به درد بخور و مدارات آماده برای شما دوستان آماده کردم ، همچنین مقاله ای کامل
برای ارائه به اساتید موجود میباشد . همچنین به علت کار این سنسور در موج مادون قرمز مقاله ای نیز
در زمینه موجهای مادون قرمز در همین مطلب موجود است که اگر از حق نگذریم مقاله ای کامل و بدون
عیب و نقصی میباشد .

هر جسمی که دمایش بالاتر از صفر درجه مطلق باشد دارای تشعشعات Infrared یا مادون قرمز
میباشد . اما این موج دارای طول موج های مختلف برای درجه حرارتهای متفاوت است . کاری که
این سنسور انجام میدهد در واقع دریافت این امواج در رنج بدن انسان و تشخیص آن میباشد . از
این سنسور در دستگاه هایی که برای تشخیص حرکت بدن انسان حتی به صورت جزئی
استفاده میشود و از نظر دقت و قابلیت اعتماد در سطح بالایی میباشد
بدین وسیله شما یک آشکار ساز حرکت دارید که فقط به حرکات بدن انسان حساس است ،
یکی از این سنسورها SPS241EA میباشد که عکس آن را در بالا می بینید ، جدول مشخصات آن
به صورت زیر میباشد
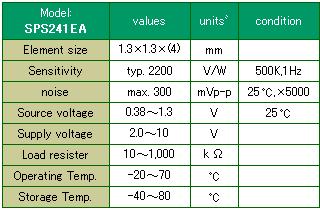
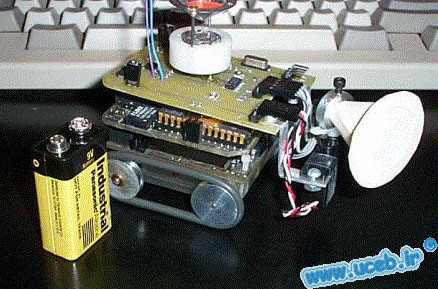
در مسائل امنیتی ، مثل دزدگیرها مفید میباشد و در مسائل مربوط به بهینه سازی مصرف انرژی
میتواند بسیار مفید واقع شود . در روبات زیر که تصویر آنرا مشاهده میکنید برای پیدا کردن انسان
در محیط های تاریک و فاقد نور کاربرد دارد . در زیر میتوانید مقاله ای را تحت همین عنوان دانلود
کنید . همچنین مدارات آماده برای ساخت یک سنسور تشخیص حرکتی را نیز برای دانلود شما
عزیزان آماده کرده ام
اینم مداری که با استفاده از PIR ساخته شده

در هر زمینه ای که مطلب خواستید نظر بگذارید تا براتون پیدا کنم ...
برای دانلود فایل پیوست اینجا کلیک نمایید
توجه داشته باشید که برای خارج کردن فایل از حالت فشرده باید برنامه winrar بر روی سیستم شما نصب باشد .
منبع : www.uceb.ir
یک اسیلاتور کریستالی مداری الکترونیکی است که از رزونانس مکانیکی یک کریستال در حال لرزش پیزوالکتریکی بهره می برد تا سیگنال الکتریکی با فرکانس بسیار دقیقی بوجود آورد. این فرکانس معمولا برای داشتن حسی از زمان (مانند در ساعت های مچی کوارتز) استفاده می شود تا سیگنال ساعتی پایدار برای مدارت مجتمع دیجیتال فراهم کند و نیز فرکانس ها را در فرستنده های رادیویی پایدار (Stable) کند.
استفاده از تقویت کننده و فیدبک فرم دقیقی از یک اسیلاتور الکترونیکی است. به کریستال استفاده شده در آن برخی مواقع "کریستال زمان سنجی (timing crystal)" گفته می شود. در دیاگرام های شماتیکی، گاهی کریستال را با XTAL نمایش می دهند.
فهرست
- کریستال های برای اهداف زمان سنجی
- کریستال ها و فرکانس
- رزونانس سری یا موازی
- فرکانس های ساختگیSpurious frequencies
- یادداشت
کریستال های برای اهداف زمان سنجی

یک کریستال 4MHz کوچک کوارتز که داخل پکیج هم اندازه ی خود (HC-49/US) واقع شده است
تقریبا هر چیزی که از مواد الاستیک ساخته شده می تواند مانند کریستال مورد استفاده قرار گیرد، با ترنسدیوسرهای (مبدل ها) متناسب، زیرا تمامی اجسام دارای فرکانس رزونانس طبیعی لرزش هستند. برای مثال، فولاد الستیسیته بالایی دارد و سرعت صوت در آن بالاست. این اغلب در فیلترهای مکانیکی، قبل از کوارتز، استفاده می شد. فرکانس رزونانس به اندازه، شکل، الاستیسیته و سرعت صوت در آن ماده بستگی دارد. کریستال های فرکانس بالا معمولا به شکل صفحه مستطیلی ساده ای بریده می شوند. کریستال های فرکانس پایین، مثل آن هایی که در ساعت های دیجیتالی استفاده می شود، به شکل یک دیاپازون (tuning fork) بریده می شوند. برای کاربردهایی که زمان سنجی بسیار دقیقی نمی خواهند از یک رزونانس کننده سرامیکی ارزان به جای کریستال کوارتز استفاده می شود.
کریستال های کوارتز زمان سنجی برای فرکانس های از ده ها کیلوهرتز تا ده ها مگاهرتز ساخته می شوند. سالانه بیشتر از دو میلیارد (2×109) کریستال تولید می شود. اکثر آن ها برای استفاده در ساعت های مچی، ساعت ها، و مدارات الکترونیکی هستند. هر چند، کریستال کوارتز داخل ابزارهای تست و اندازه گیری مثل شمارنده ها، سیگنال ژنراتورها و اسیلوسکوپ ها نیز پیدا می شود.

مدار اسیلاتور کریستالی نوسان را با گرفتن سیگنال ولتاژی از رزونانس کننده ی کوارتز، تقویت آن و فیدبک کردن آن به رزونانس کننده، نگه می دارد. سرعت خم و راست شدن کوارتز فرکانس رزونانس است و توسط برش اندازه کریستال تعیین می شود.
فرکانس خروجی یک اسیلاتور کوارتز یا فرکانس اصلی رزونانس آن یا یک ضریبی از فرکانس رزونانس آن به نام فرکانس اور تون (overtone) است.
اگر چه کریستال ها می توانند برای هر فرکانس رزونانسی ساخته شوند، به دلیل محدودیت های فنی، در عمل مهندسان مدار اسیلاتور کریستالی در حوالی فرکانس های استاندارد کمی طراحی می کنند مانند 10MHz، 20MHz و 40MHz. استفاده از مدار های مقسم فرکانس، چند برابر کننده ی فرکانس و phase locked loop برای سنتز کردن (ساختن) هر فرکانس دلخواه از فرکانس مرجع امکان پذیر است.
Notation
منبع: http://en.wikipedia.org/wiki/Crystal_oscillator
ترجمه شده توسط موسسه پژوهشی تحقیقاتی ندای آروین اصفهان
در صورتی که بسته بندی مدارات مجتمع و استانداردهای آن برایتان نا آشناست، با مطالعه ی این مقاله نکات  مفیدی خواهید آموخت.
مفیدی خواهید آموخت.
عناوین مطالب شامل موارد زیر می باشد:
چرا به Package نیاز است؟
انواع Package مدارات مجتمع
تکنولوژی Through-hole
تکنولوژی نصب سطحی
كابل UTP یكی از متداولترین كابل های استفاده شده در شبكه های مخابراتی و كامپیوتری است . از كابل های فوق ، علاوه بر شبكه های كامپیوتری در سیستم های تلفن نیز استفاده می گردد ( CAT1 ). شش نوع كابل UTP متفاوت وجود داشته كه می توان با توجه به نوع شبكه و اهداف مورد نظر از آنان استفاده نمود . كابل CAT5 ، متداولترین نوع كابل UTP محسوب می گردد.
» مشخصه های كابل UTP
با توجه به مشخصه های كابل های UTP ، امكان استفاده ، نصب و توسعه سریع و آسان آنان ، فراهم می آورد .
در زیر انواع كابل های UTP نشان داده شده است .
گروه CAT1 سیستم های قدیمی تلفن ، ISDN و مودم سرعت انتقال اطلاعات حداكثر تا یك مگابیت در ثانیه
گروه CAT2 شبكه های Token Ring سرعت انتقال اطلاعات حداكثر تا چهار مگابیت در ثانیه
گروه CAT3شبكه های Token ring و 10 BASE-T سرعت انتقال اطلاعات حداكثر تا ده مگابیت در ثانیه
گروه CAT4 شبكه های Token Ringسرعت انتقال اطلاعات حداكثر تا شانزده مگابیت در ثانیه
گروه CAT5 اترنت 10mb ، اترنت سریع ۱۰۰mb و شبكه های Token Ring با سرعت 16mbدر ثانیه سرعت انتقال اطلاعات حداكثر تا یكصد مگابیت در ثانیه
گروه CAT5e شبكه های Gigabit Ethernet سرعت انتقال اطلاعات حداكثر تا یكهزار مگابیت در ثانیه
گروه CAT6شبكه های Gigabit Ethernet سرعت انتقال اطلاعات حداكثر تا یكهزار مگابیت در ثانیه
توضیحات : تقسیم بندی هر یك از گروه های فوق بر اساس نوع كابل مسی و Jack انجام شده است .
از كابل های CAT1، به دلیل عدم حمایت ترافیك مناسب، در شبكه های كامپیوتری استفاده نمی گردد .
از كابل های گروه CAT2, CAT3, CAT4, CAT5 و CAT6 در شبكه ها استفاده می گردد .
كابل های فوق ، قادر به حمایت از ترافیك تلفن و شبكه های كامپیوتری می باشند .
از كابل های CAT2 در شبكه های Token Ring استفاده شده و سرعتی بالغ بر 4 مگابیت در ثانیه را ارائه می نمایند .
برای شبكه هائی با سرعت بالا ( یكصد مگا بیت در ثانیه ) از كابل های CAT5 و برای سرعت ده مگابیت در ثانیه از كابل های CAT3 استفاده می گردد.
در كابل های CAT3 ,CAT4 و CAT5 از چهار زوج كابل مسی استفاده شده است . CAT5 نسبت به CAT3 دارای تعداد بیشتری پیچش در هر اینچ می باشد . بنابراین این نوع از كابل ها سرعت و مسافت بیشتر ی را حمایت می نمایند . از كابل های CAT3 و CAT4 در شبكه هایToken Ring استفاده می گردد .
حداكثر مسافت در كابل های CAT3 ، یكصد متر است .
حداكثر مسافت در كابل های CAT4 ، دویست متر است .
كابل CAT6 با هدف استفاده در شبكه های اترنت گیگابیت طراحی شده است .
در این رابطه استانداردهائی نیز وجود دارد كه امكان انتقال اطلاعات گیگابیت بر روی كابل های CAT5 را فراهم می نماید( CAT5e )
كابل های CAT6 مشابه كابل های CAT5 بوده ولی بین 4 زوج كابل آنان از یك جداكننده فیزیكی به منظور كاهش پارازیت های الكترومغناطیسی استفاده شده و سرعتی بالغ بر یكهزار مگابیت در ثانیه را ارائه می نمایند.
در شبكه lan شركت های بزرگ از كابل cat6 از نوع utp برای مسافت های زیر زیر 100 متر و برای بالاتر از 100 از نوع sftp استفاده شده است .
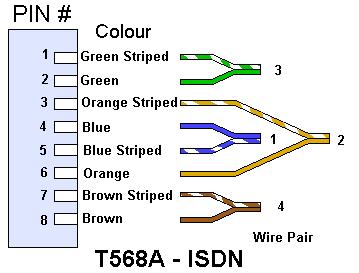
» رنگ بندی رشته های كابل شبكه اولیه و استاندارد در سیستم CAT5 و CAT6 نوع A
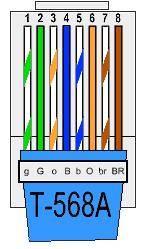
1- سفید سبز
2- سبز
3- سفید نارنجی
4- آبی
5- سفید آبی
6- نارنجی
7- سفید قهوه ای
8- قهوه ای
» رنگ بندی رشته های كابل شبكه اولیه و استاندارد در سیستم CAT5 و CAT6 نوع B
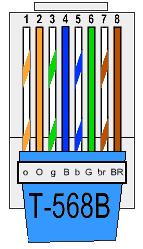
1- سفید نارنجی
2- نارنجی
3- سفید سبز
4- آبی
5- سفید آبی
6- سبز
7- سفید قهوه ای
8- قهوه ای
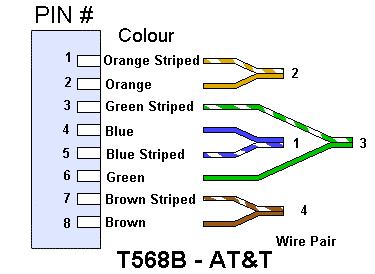
» جز تغییر در ترتیب رنگ بندی کابل ها من هیچ گونه تغییر دیگری در سیم ها پیدا نکردم ...
این نوع اتصال برای یك شبكه كه از چند كامپیوتر و بوسیله هاب صورت می گیرد و هر دو سر سیم متناظر و 1 به 1 بهم اتصال پیدا می كنند .
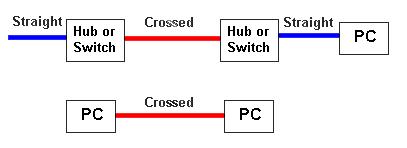
برای اتصال دو كامپوتر و بدون هاب یا برای اتصال دو عدد هاب به همدیگر جهت ارتباط دو شبكه با هم از كابل با سیستم اتصال كراس استفاده میشود كه یك بصورت معمولی و سر دیگر سیم در سردیگر سیم 1به3 و 2 به6 وصل میشود
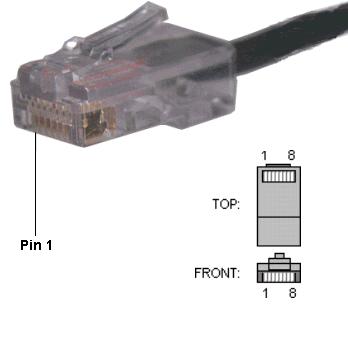
نحوه اتصال رشته كابل با توجه به شماره آن در سوكت قرار داده شده و سوكت پرس میشود .
تذكر شماره گذاری از سمت مخالف خار سوكت(طرف تخت سوكت) و از سمت چپ به راست صورت می گیرد .
» اتصال به صورت استرایت یا مستقیم
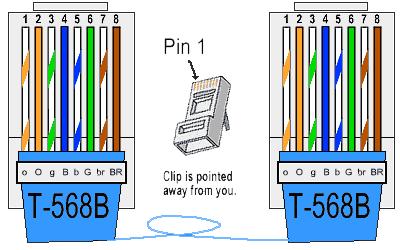
سر اول سیم : 8 7 6 5 4 3 2 1
سر دوم سیم : 8 7 6 5 4 3 2 1
» اتصال به صورت کراس
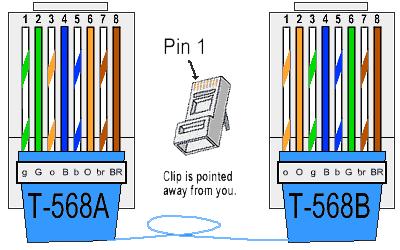
سر اول سیم : 8 7 6 5 4 3 2 1
سر دوم سیم : 8 7 2 5 4 1 6 3
در فرم اتصال دو كامپیوتر یا دوhub به همدیگراتصال كراس (Crossover cable ) در سر دیگر سیم 1به3 و 2 به6 وصل میشود .
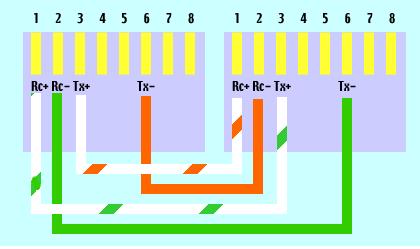
» در این تصویر به صورت فنی به این نوع سیم کشی پرداخته شده است و سیستم فرستندگی و گیرندگی را نشان می دهد.
» در تصویر زیر آچار مخصوص اتصال را مشاهده می فرمایید.
اطلاعات جانبی برای شبکه کردن 2 تا کامپیوتر
برای تنظیم و نام گذاری گروها و نام كامپیوتر
» در ویندوز XP
MY COMPUTER
RIGHT CLICK
SYSTEM PROPERTIES
COMPUTER NAME
CHANGE
COMPUTER NAME : ELEELE1
WORKGROUP : WORKGROUP
» تنظیم شبكه به صورت دستی جهت كنترل بیشتر بر روی شبكه
Win XP
Server :
Ip address 192.168.0.1
Subnet mask 255.255.255.0
blankDefault gateway
- - -
Preferred DNS server 127.0.0.1
Alternate DNS server blank
Win XP
Client:
Ip address 192.168.0.2
Subnet mask 255.255.255.0
Default gateway 192.168.1.1
- - -
Preferred DNS server 127.0.0.1
Alternate DNS server blank
انرژی الکتریکی را توسط میدان الکترواستاتیکی (بار الکتریکی) در خود ذخیره کند. انواع خازن در مدارهای الکتریکی بکار میروند. خازن را با حرف C که ابتدای کلمه capacitor است نمایش میدهند. ساختمان داخلی خازن از دو قسمت اصلی تشکیل میشود:
الف – صفحات هادی ب – عایق بین هادیها (دی الکتریک) ساختمان خازن هرگاه دو هادی در مقابل هم قرار گرفته و در بین آنها عایقی قرار داده شود، تشکیل خازن میدهند. معمولاً صفحات هادی خازن از جنس آلومینیوم ، روی و نقره با سطح نسبتاً زیاد بوده و در بین آنها عایقی (دی الکتریک) از جنس هوا ، کاغذ ، میکا ، پلاستیک ، سرامیک ، اکسید آلومینیوم و اکسید تانتالیوم استفاده میشود. هر چه ضریب دی الکتریک یک ماده عایق بزرگتر باشد آن دی الکتریک دارای خاصیت عایقی بهتر است. به عنوان مثال ، ضریب دی الکتریک هوا 1 و ضریب دی الکتریک اکسید آلومینیوم 7 میباشد. بنابراین خاصیت عایقی اکسید آلومینیوم 7 برابر خاصیت عایقی هوا است. انواع خازن الف- خازنهای ثابت • سرامیکی • خازنهای ورقهای • خازنهای میکا • خازنهای الکترولیتی o آلومینیومی o تانتالیوم
ب- خازنهای متغیر • واریابل • تریمر انواع خازن بر اساس شکل ظاهری آنها 1. مسطح 2. کروی 3. استوانهای انواع خازن بر اساس دی الکتریک آنها 1. خازن کاغذی 2. خازن الکترونیکی 3. خازن سرامیکی 4. خازن متغییر
ظرفیت
ظرفیت معیاری برای اندازه گیری توانایی نگهداری انرژی الکتریکی است. ظرفیت زیاد بدین معنی است که خازن قادر به نگهداری انرژی الکتریکی بیشتری است. واحد اندازه گیری ظرفیت فاراد است. 1 فاراد واحد بزرگی است و مشخص کننده ظرفیت بالا میباشد. باید گفت که ظرفیت خازن ها یک کمیت فیزیکی هست و به ساختمان خازن وابسته است و به مدار و اختلاف پتانسیل بستگی ندارد
بنابراین استفاده از واحدهای کوچکتر نیز در خازنها مرسوم است. میکروفاراد µF، نانوفاراد nF و پیکوفاراد pF واحدهای کوچکتر فاراد هستند.
µ means 10-6 (millionth), so 1000000µF = 1F
n means 10-9 (thousand-millionth), so 1000nF = 1µF
p means 10-12 (million-millionth), so 1000pF = 1nF
خازن کروی
خازن مسطح (خازن تخت) دو صفحه فلزی موازی که بین آنها عایقی به نام دی الکتریک قرار دارد، مانند (هوا ، شیشه). با اتصال صفحات خازن به یک مولد میتوان خازن را باردار کرد. اختلاف پتانسیل بین دو سر صفحات خازن برابر اختلاف پتانسیل دو سر مولد خواهد بود. ظرفیت خازن (C) نسبت مقدار باری که روی صفحات انباشته میشود بر اختلاف پتانسیل دو سر باتری را ظرفیت خازن گویند؛ که مقداری ثابت است.
C = kε0 A/d
C = ظرفیت خازن بر حسب فاراد
Q = بار ذخیره شده برحسب کولن
V = اختلاف پتانسیل دو سر مولد برحسب ولت
ε0 = قابلیت گذر دهی خلا است که برابر است با: 8.85 × 12-10 _ C2/N.m2
k (بدون یکا) = ثابت دی الکتریک است که برای هر مادهای فرق دارد. تقریباً برای هوا و خلأ 1=K است و برای محیطهای دیگر مانند شیشه و روغن 1
A = سطح خازن بر حسب m2
d =فاصله بین دو صفه خازن بر حسب m
چند نکته • آزمایش نشان میدهد که ظرفیت یک خازن به اندازه بار (q) و به اختلاف پتانسیل دو سر خازن (V) بستگی ندارد بلکه به نسبت q/v بستگی دارد. • بار الکتریکی ذخیره شده در خازن با اختلاف پتانسیل دو سر خازن نسبت مستقیم دارد. یعنی: q a v • ظرفیت خازن با فاصله بین دو صفحه نسبت عکس دارد. یعنی: C a 1/d • ظرفیت خازن با مساحت هر یک از صفحات و جنس دی الکتریک (K )نسبت مستقیم دارد. یعنی: C a A و C a K شارژ یا پر کردن یک خازن وقتی که یک خازن بی بار را به دو سر یک باتری وصل کنیم؛ الکترونها در مدار جاری میشوند. بدین ترتیب یکی از صفحات بار (+) و صفحه دیگر بار (-) پیدا میکند. آن صفحهای که به قطب مثبت باتری وصل شده ؛ بار مثبت و صفحه دیگر بار منفی پیدا میکند. خازن پس از ذخیره کردن مقدار معینی از بار الکتریکی پر میشود. یعنی با توجه به اینکه کلید همچنان بسته است؛ ولی جریانی از مدار عبور نمیکند و در واقع جریان به صفر میرسد. یعنی به محض اینکه یک خازن خالی بدون بار را در یک مدار به مولد متصل کردیم؛ پس از مدتی کوتاه عقربه گالوانومتر دوباره روی صفر بر میگردد. یعنی دیگر جریانی از مدار عبور نمیکند. در این حالت میگوییم خازن پرشده است. دشارژ یا تخلیه یک خازن ابتدا خازنی را که پر است در نظر میگیریم. دو سر خازن را توسط یک سیم به همدیگر وصل میکنیم. در این حالت برای مدت کوتاهی جریانی در مدار برقرار میشود و این جریان تا زمانی که بار روی صفحات خازن وجود دارد برقرار است. پس از مدت زمانی جریان صفر خواهد شد. یعنی دیگر باری بر روی صفحات خازن وجود ندارد و خازن تخلیه شده است. اگر خازن کاملاً پر شود دیگر جریانی برقرار نمیشود و اگر خازن کاملاً تخلیه شود باز هم جریانی برقرار نمیشود.
تأثیر ماده دیالکتریک در فضای بین دو صفحه موازی یک خازن وقتی که خازنی را به مولدی وصل میکنیم؛ یک میدان یکنواخت در داخل خازن بوجود میآید. این میدان الکتریکی بر توزیع بارهای الکتریکی اتمی عایقی که در درون صفحات قرار دارد اثر میگذارد و باعث میشود که دو قطبیهای موجود در عایق طوری شکل گیری کنند؛ که در یک سمت عایق بارهای مثبت و در سمت دیگر آن بارهای منفی تجمّع کنند. توزیع بارهایی که در لبههای عایق قرار دارند؛ بر بارهای روی صفحات خازن اثر میگذارد. یعنی بارهای منفی روی لبههای عایق؛ بارهای مثبت بیشتری را روی صفحات خازن جمع میکند؛ و همینطور بارهای مثبت روی لبههای عایق بارهای منفی بیشتری را روی صفحات خازن جمع میکند. بنابراین با افزایش ثابت دی الکتریک (K) میتوان بارهای بیشتری را روی خازن جمع کرد و باعث افزایش ظرفیت یک خازن شد. با گذاشتن دی الکتریک در بین صفحات یک خازن ظرفیت آن افزایش مییابد. میدان الکتریکی درون خازن تخت در فضای بین صفحات خازن بار دار میدان الکتریکی یکنواختی برقرار میشود که جهت آن همواره از صفحه مثبت خازن به سمت صفحه منفی خازن است. اندازه میدان همواره یک عدد ثابت میباشد.
E=V/d
E: میدان الکتریکی
V: اختلاف پتانسیل دو سر خازن
d: فاصله بین دو صفحه خازن
میدان الکتریکی با اختلاف پتانسیل دو سر خازن نسبت مستقیم و با فاصله بین صفحات خازن نسبت عکس دارد. به هم بستن خازنها خازنها در مدار به دو صورت بسته میشوند: 1. موازی 2. متوالی (سری) بستن خازنها به روش موازی در بستن به روش موازی بین خازنها دو نقطه اشتراک وجود دارد. در این نوع روش:
• اختلاف پتانسیل برای همة خازنها یکی است. • بار ذخیره شده در کل مدار برابر است با مجموع بارهای ذخیره شده در هریک از خازنها. ظرفیت معادل در حالت موازی مولد V = V1 = V2 = V3
بار کل Q = Q1 + Q2 + Q3
CV = C1V1 + C2V2 + C3V3
ظرفیت کل : C = C1 + C2 + C3
اندیسها مربوط به خازنهای 1 ؛ 2 و 3 میباشد. هرگاه چند خازن باهم موازی باشند، ظرفیت خازن معادل برابر است با مجموع ظرفیت خازنها.
بستن خازنها بصورت متوالی در بستن به روش متوالی بین خازنها یک نقطه اشتراک وجود دارد و تنها دو صفحه دو طرف مجموعه به مولد بسته شده ؛ از مولد بار دریافت میکند. صفحات مقابل نیز از طریق القاء بار الکتریکی دریافت میکنند. بنابراین اندازه بار الکتریکی روی همه خازنها در این حالت باهم برابر است. در بستن خازنها به طریق متوالی:
• بارهای روی صفحات هر خازن یکی است. • اختلاف پتانسیل دو سر مدار برابر است با مجموع اختلاف پتانسیل دو سر هر یک از خازنها. ظرفیت معادل در حالت متوالی:
بار کل Q = Q1 + Q2 + Q3
اختلاف پتانسیل کل V = V1 = V2 = V3
q/C = q1/C1 + q2/C2 + q3/C3
C-1 = 1/C1 + 1/C2 + 1/C3
ظرفیت کل در حالت متوالی ، وارون ظرفیت معادل ، برابر است با مجموع وارون هریک از خازنها.
انرژی ذخیره شده در خازن پر شدن یک خازن باعث بوجود آمدن بار ذخیره در روی آن میشود و این هم باعث میشود که انرژی روی صفحات ذخیره گردد. کل کاری که در فرآیند پر شدن خازن انجام میشود از طریق محاسبه بدست میآید. کاربرد خازن با توجه به اینکه بار الکتریکی در خازن ذخیره میشود؛ برای ایجاد میدانهای الکتریکی یکنواخت میتوان از خازن استفاده کرد. خازنها میتوانند میدانهای الکتریکی را در حجمهای کوچک نگه دارند؛ به علاوه میتوان از آنها برای ذخیره کردن انرژی استفاده کرد. خازن در اشکال مختلف ساخته میشود.
خازن وسیلهای الکتریکی است که در مدارهای الکتریکی اثر خازنی ایجاد میکند. اثر خازنی خاصیتی است که سب میشود مقداری انرژی الکتریکی در یک میدان الکترواستاتیک ذخیره شود و بعد از مدتی آزاد گردد. به تعبیر دیگر ، خازنها المانهایی هستند که میتوانند مقداری الکتریسیته را به صورت یک میدان الکترواستاتیک در خود ذخیره کنند. همانگونه که یک مخزن آب برای ذخیره کردن مقداری آب مورد استفاده قرار میگیرد. خازنها به اشکال گوناگون ساخته میشوند و متداولترین آنها خازنهای مسطح هستند.
این نوع خازنها از دو صفحه هادی که بین آنها عایق یا دی الکتریک قرار دارد. صفحات هادی نسبتا بزرگ هستند و در فاصلهای بسیار نزدیک به هم قرار میگیرند. دی الکتریک انواع مختلفی دارد و با ضریب مخصوصی که نسبت به هوا سنجیده میشود، معرفی میگردد. این ضریب را ضریب دی الکتریک مینامند. خازنها به دو دسته کلی ثابت و متغیر تقسیم بندی میشوند. خازنها انواع مختلفی دارند و از لحاظ شکل و اندازه با یک دیگر متفاوتاند. بعضی از خازنها از روغن پر شده و بسیار حجیماند. برخی دیگر بسیار کوچک و به اندازه یک دانه عدس میباشند. خازنها بر حسب ثابت یا متغیر بودن ظرفیت به دو گروه تقسیم میشوند:
خازنهای ثابت و خازنهای متغیر.
خازنهای ثابت
این خازنها دارای ظرفیت معینی هستند که در وضعیت معمولی تغییر پیدا نمیکنند. خازنهای ثابت را بر اساس نوع ماده دی الکتریک به کار رفته در آنها تقسیم بندی و نام گذاری میکنند و از آنها در مصارف مختلف استفاده میشود. از جمله این خازنها میتوان انواع سرامیکی ، میکا ، ورقهای ( کاغذی و پلاستیکی ) ،الکترولیتی ، روغنی ، گازی و نوع خاص فیلم (Film) را نام برد. اگر ماده دی الکتریک طی یک فعالیت شیمیایی تشکیل شده باشد آن را خازن الکترولیتی و در غیر این صورت آن را خازن خشک گویند. خازنهای روغنی و گازی در صنعت برق بیشتر در مدارهای الکتریکی برای راه اندازی و یا اصلاح ضریب قدرت به کار میروند. بقیه خازنهای ثابت دارای ویژگیهای خاصی هستند.
خازنهای متغیر
به طور کلی با تغییر سه عامل میتوان ظرفیت خازن را تغیییر داد: “فاصله صفحات” ، “سطح صفحات” و “نوع دی الکتریک”. اساس کار خازن متغیر بر مبنای تغییر سطح مشترک صفحات خازن یا تغییر ضخامت دی الکتریک است، ظرفیت یک خازن نسبت مستقیم با سطح مشترک دو صفحه خازن دارد. خازنهای متغیر عموما ازنوع عایق هوا یا پلاستیک هستند. نوعی که به وسیله دسته متحرک (محور) عمل تغییر ظرفیت انجام میشود “واریابل” نامند و در نوع دیگر این عمل به وسیله پیچ گوشتی صورت میگیرد که به آن “تریمر” گویند. محدوده ظرفیت خازنهای واریابل 10 تا 400 پیکو فاراد و در خازنهای تریمر از 5 تا 30 پیکو فاراد است. از این خازنها در گیرندههای رادیویی برای تنظیم فرکانس ایستگاه رادیویی استفاده میشود.
خازنهای سرامیکی
خازن سرامیکی (Ceramic capacitor) معمولترین خازن غیر الکترولیتی است که در آن دی الکتریک بکار رفته از جنس سرامیک است. ثابت دی الکتریک سرامیک بالا است، از این رو امکان ساخت خازنهای با ظرفیت زیاد در اندازه کوچک را در مقایسه با سایر خازنها بوجود آورده ، در نتیجه ولتاژ کار آنها بالا خواهد بود. ظرفیت خازنهای سرامیکی معمولا بین 5 پیکو فاراد تا 1/0 میکرو فاراد است. این نوع خازن به صورت دیسکی (عدسی) و استوانهای تولید میشود و فرکانس کار خازنهای سرامیکی بالای 100 مگاهرتز است. عیب بزرگ این خازنها وابسته بودن ظرفیت آنها به دمای محیط است، زیرا با تغییر دما ظرفیت خازن تغییر میکند. از این خازن در مدارهای الکترونیکی ، مانند مدارهای مخابراتی و رادیویی استفاده میشود.
خازنهای ورقهای
در خازنهای ورقهای از کاغذ و مواد پلاستیکی به سبب انعطاف پذیری آنها ، برای دی الکتریک استفاده میشود. این گروه از خازنها خود به دو صورت ساخته میشوند:
خازنهای کاغذی
دی الکتریک این نوع خازن از یک صفحه نازک کاغذ متخلخل تشکیل شده که یک دی الکتریک مناسب درون آن تزریق میگردد تا مانع از جذب رطوبت گردد. برای جلوگیری از تبخیر دی الکتریک درون کاغذ ، خازن را درون یک قاب محکم و نفوذ ناپذیر قرار میدهند. خازنهای کاغذی به علت کوچک بودن ضریب دی الکتریک عایق آنها دارای ابعاد فیزیکی بزرگ هستند، اما از مزایای این خازنها آن است که در ولتاژها و جریانهای زیاد میتوان از آنها استفاده کرد.
خازنهای پلاستیکی
در این نوع خازن از ورقههای نازک پلاستیک برای دی الکتریک استفاده میشود. ورقههای پلاستیکی همراه با ورقههای نازک فلزی (آلومینیومی) به صورت لوله ، در درون قاب پلاستیکی بسته بندی میشوند. امروزه این نوع خازنها به دلیل داشتن مشخصات خوب در مدارات زیاد به کار میروند. این خازنها نسبت به تغییرات دما حساسیت زیادی ندارند، به همین سبب از آنها در مداراتی استفاده میکنند که احتیاج به خازنی با ظرفیت ثابت در مقابل حرارت باشد. یکی از انواع دی الکتریکهایی که در این خازنها به کار میرود پلی استایرن (Polystyrene) است، از این رو به این خازنها “پلی استر” گفته میشود که از جمله رایجترین خازنهای پلاستیکی است. ماکزیمم فرکانس کار خازنهای پلاستیکی حدود یک مگا هرتز است.
خازنهای میکا
در این نوع خازن از ورقههای نازک میکا در بین صفحات خازن (ورقههای فلزی – آلومینیوم) استفاده میشود و در پایان ، مجموعه در یک محفظه قرار داده میشوند تا از اثر رطوبت جلوگیری شود. ظرفیت خازنهای میکا تقریبا بین 01/0 تا 1 میکرو فاراد است. از ویژگیهای اصلی و مهم این خازنها میتوان داشتن ولتاژ کار بالا ، عمر طولانی و کاربرد در مدارات فرکانس بالا را نام برد.
خازنهای الکترولیتی
این نوع خازنها معمولاً در رنج میکرو فاراد هستند. خازنهای الکترولیتی همان خازنهای ثابت هستند، اما اندازه و ظرفیتشان از خازنهای ثابت بزرگتر است. نام دیگر این خازنها، شیمیایی است. علت نامیدن آنها به این نام این است که دی الکتریک این خازنها را به نوعی مواد شیمیایی آغشته میکنند که در عمل ، حالت یک کاتالیزور را دارا میباشند و باعث بالا رفتن ظرفیت خازن میشوند. برخلاف خازنهای عدسی ، این خازنها دارای قطب یا پایه مثبت و منفی میباشند. روی بدنه خازن کنار پایه منفی ، علامت – نوشته شده است. مقدار واقعی ظرفیت و ولتاژ قابل تحمل آنها نیز روی بدنه درج شده است .خازنهای الکترولیتی در دو نوع آلومینیومی و تانتالیومی ساخته میشوند.
خازن آلومینیومی
این خازن همانند خازنهای ورقهای از دو ورقه آلومینیومی تشکیل شده است. یکی از این ورقهها که لایه اکسید روی آن ایجاد میشود “آند” نامیده میشود و ورقه آلومینیومی دیگر نقش کاتد را دارد. ساختمان داخلی آن بدین صورت است که دو ورقه آلومینیومی به همراه دو لایه کاغذ متخلخل که در بین آنها قرار دارند هم زمان پیچیده شده و سیمهای اتصال نیز به انتهای ورقههای آلومینیومی متصل میشوند. پس از پیچیدن ورقهها آن را درون یک الکترولیت مناسب که شکل گیری لایه اکسید را سرعت میبخشد غوطهور میسازند تا دو لایه کاغذ متخلخل از الکترولیت پر شوند. سپس کل مجموعه را درون یک قاب فلزی قرار داده و با یک پولک پلاستیکی که سیمهای خازن از آن میگذرد محکم بسته میشود.
خازن تانتالیوم
در این نوع خازن به جای آلومینیوم از فلز تانتالیوم استفاده میشود زیاد بودن ثابت دی الکتریک اکسید تانتالیوم نسبت به اکسید آلومینیوم (حدودا 3 برابر) سبب میشود خازنهای تانتالیومی نسبت به نوع آلومینیومی درحجم مساوی دارای ظرفیت بیشتری باشند. محاسن خازن تانتالیومی نسبت به نوع آلومینیومی بدین قرار است:
ابعاد کوچکتر جریان نشتی کمتر عمر کارکرد طولانی از جمله معایب این نوع خازن در مقایسه با خازنهای آلومینیومی عبارتند از:
خازنهای تانتالیوم گرانتر هستند. نسبت به افزایش ولتاژ اعمال شده در مقابل ولتاژ مجاز آن ، همچنین معکوس شدن پلاریته حساس ترند. قابلیت تحمل جریانهای شارژ و دشارژ زیاد را ندارند. خازنهای تانتالیوم دارای محدودیت ظرفیت هستند (حد اکثر تا 330 میکرو فاراد ساخته می شوند).
کد رنگی خازن ها
در خازنهای پلیستر برای سالهای زیادی از کدهای رنگی بر روی بدنه آنها استفاده میشد. در این کدها سه رنگ اول ظرفیت را نشان میدهند و رنگ چهارم تولرانس(درصد خطا) را نشان میدهد . برای مثال قهوهای - مشکی - نارنجی به معنی 10000 پیکوفاراد یا 10 نانوفاراد است. خازنهای پلیستر امروزه به وفور در مدارات الکترونیک مورد استفاده قرار میگیرند. این خازنها در برابر حرارت زیاد معیوب میشوند و بنابراین هنگام لحیمکاری باید به این نکته توجه داشت.
ترتیب رنگی خازنها به ترتیب از ۰ تا ۹ به صورت زیر است:
سیاه، قهوه ای، قرمز، نارنجی، زرد، سبز، آبی، بنفش، خاکستری، سفید
خازنها با هر ظرفیتی وجود ندارند. بطور مثال خازنهای 22 میکروفاراد یا 47 میکروفاراد وجود دارند ولی خازنهای 25 میکروفاراد یا 117 میکروفاراد وجود ندارند. دلیل اینکار چنین است :
فرض کنیم بخواهیم خازنها را با اختلاف ظرفیت ده تا ده تا بسازیم. مثلاً 10 و 20 و 30 و. .. به همین ترتیب. در ابتدا خوب بنظر میرسد ولی وقتی که به ظرفیت مثلاً 1000 برسیم چه رخ میدهد ؟
مثلاً 1000 و 1010 و 1020 و. .. که در اینصورت اختلاف بین خازن 1000 میکروفاراد با 1010 میکروفاراد بسیار کم است و فرقی با هم ندارند پس این مساله معقول بنظر نمیرسد. برای ساختن یک رنج محسوس از ارزش خازنها، میتوان برای اندازه ظرفیت از مضارب استاندارد 10 استفاده نمود. مثلاً 7/4 - 47 - 470 و. .. و یا 2/2 - 220 - 2200 و.. .
خازنهای متغیر
در مدارات تیونینگ رادیویی از این خازنها استفاده میشود و به همین دلیل به این خازنها گاهی خازن تیونینگ هم اطلاق میشود. ظرفیت این خازنها خیلی کم و در حدود 100 تا 500 پیکوفاراد است و بدلیل ظرفیت پایین در مدارات تایمینگ مورد استفاده قرار نمیگیرند.
در مدارات تایمینگ از خازنهای ثابت استفاده میشود و اگر نیاز باشد دوره تناوب را تغییر دهیم، این عمل بکمک مقاومت انجام میشود .
خازنهای تریمر
خازنهای تریمر خازنهای متغییر کوچک و با ظرفیت بسیار پایین هستند. ظرفیت این خازنها از حدود 1 تا 100 پیکوفاراد است و بیشتر در تیونرهای مدارات با فرکانس بالا مورد استفاده قرار میگیرند .
حسگر یک وسیله ی الکتریکی است که تغییرات فیزیکی یا شیمیایی را اندازه گیری می کند وآنها را به سیگنالهای الکتریکی تبدیل می نماید. حسگرها درواقع ابزار ارتباط ربات با دنیای خارج وکسب اطلاعات محیطی ونیز داخلی می باشند، ویا به طور کلی ابزارهایی هستند که تحت شرایط خاص ازخود واکنشهای پیش بینی شده ومورد انتظار نشان می دهند. شاید بتوان دماسنج را جزء اولین حسگرهایی دانست که بشرساخت .
درطراحی یک حسگر دانشمندان علوم مختلف مانند بیوشیمی، بیولوژی، الکترونیک، شاخه های مختلف شیمی و فیزیک حضوردارند. قسمت اصلی یک حسگرشیمیایی یا زیستی عنصرحسگر آن می باشد. عنصرحسگر در تماس با یک آشکارساز است. این عنصرمسئول شناسایی و پیوند شدن با گونه ی مورد نظر در یک نمونه ی پیچیده است. سپس آشکارساز سیگنالهای شیمیایی را که در نتیجه ی پیوند شدن عنصرحسگر با گونه ی موردنظر تولید شده است را به یک سیگنال خروجی قابل اندازه گیری تبدیل می کند. حسگرهای زیستی بر اجزای بیولوژیکی نظیرآنتی بادی ها تکیه دارند. آنزیمها ، گیرنده ها یا کل سلولها می توانند به عنوان عنصر حسگرمورد استفاده قرار گیرند.
یک حسگرایده آل باید خصوصیات زیررا داشته باشد :
1. سیگنال خروجی باید متناسب با نوع و میزان گونه ی هدف باشد.
2. بسیار اختصاصی نسبت به گونه مورد نظر عمل کند.
3. قدرت تفکیک و گزینش پذیری بالایی داشته باشد.
4. تکرارپذیری و صحت بالایی داشته باشد.
5. سرعت پاسخ دهی بالایی داشته باشد. ( درحد میلی ثانیه )
6. عدم پاسخ دهی به عوامل مزاحم محیطی مانند دما ، قدرت یونی محیط و …
با پیشرفت علم در دنیا و پیدایش تجهیزات الکترونیکی و تحولات عظیمی که در چند دهه ی اخیر و درخلال قرن بیستم به وقوع پیوست نیاز به ساخت حسگرهای دقیق تر،کوچکتر و دارای قابلیتهای بیشتر احساس شد. امروزه از حسگرهایی با حساسیت بالا استفاده می شود به طوریکه در برابر مقادیر ناچیزی از گاز، گرما و یا تشعشع حساس اند. بالا بردن درجه ی حساسیت، بهره و دقت این حسگرها به کشف مواد و ابزارهای جدید نیاز دارد. نانو حسگرها، حسگرهایی در ابعاد نانومتری هستند که به خاطرکوچکی و نانومتری بودن ابعادشان از دقت و واکنش پذیری بسیار بالایی برخوردارند به طوری که حتی نسبت به حضور چند اتم از یک گاز هم عکسالعمل نشان می دهند.
نانوحسگرها براساس نوع ساختارشان به سه دسته ی نقاط کوانتومی ، نانولوله های کربنی و نانوابزارها تقسیم بندی می شوند:
1.استفاده از نقاط کوانتومی درتولید نانو حسگرها:
نقاط کوانتومی به عنوان بلورهای نیمه هادی کوچک تعریف می شوند. با کنترل ابعاد نقاط کوانتومی، میدان الکترومغناطیسی نور را دررنگها و طول موجهای مختلف، منتشرمی کند. به عنوان مثال، نقاط کوانتومی از جنس آرسنیدکادمیوم با ابعاد 3 نانومتر نور سبز منتشر می کند؛ درحالی که ذراتی به بزرگی 5/5 نانومتر از همان ماده نور قرمز منتشرمی کند. به دلیل قابلیت تولید نور در طول موجهای خاص نقاط کوانتومی ، این بلورهای ریز در ادوات نوری به کارمی روند. دراین عرصه از نقاط کوانتومی در ساخت آشکارسازهای مادون قرمز، دیودهای انتشار دهنده ی نورمی توان استفاده نمود. آشکارسازهای مادون قرمز از اهمیت فوق العاده ای برخوردارند. مشکل اصلی این آشکارسازها مسئله ی خنک سازی آنهاست. برای خنک سازی این آشکارسازها از اکسیژن مایع وخنک سازی الکترونیکی استفاده می شود. این آشکارسازها برای عملکرد صحیح باید دردماهای بسیار پائین، نزدیک به 80 درجه کلوین کارکنند، بنابراین قابل استفاده در دمای اتاق نیستند، درصورتی که از آشکارسازهای ساخته شده با استفاده از نقاط کوانتومی می توان به راحتی در دمای اتاق استفاده کرد.
2. استفاده ازنانولوله ها درتولید نانوحسگرها:
نانو لوله های کربنی تک دیواره و چند دیواره به علت داشتن خواص مکانیکی و الکترونیکی منحصر به فردشان کاربردهای متنوعی پیدا کردند که از جمله می توان به استفاده از آنها به عنوان حسگرهایی با دقت بسیار بالا برای تشخیص مواد در غلظتهای بسیار پائین و با سرعت بالا اشاره کرد.
به طورکلی کاربرد نانو لوله ها در حسگرها را می توان به دو دسته تقسیم کرد:
الف ) نانولوله های کربنی به عنوان حسگرهای شیمیایی:
این حسگرها می توانند دردمای اتاق غلظتهای بسیارکوچکی از مولکولهای گازی با حساسیت بسیاربالا را آشکارسازی کنند. حسگرهای شیمیایی شامل مجموعه ای از نانولوله های تک دیواره هستند و میتوانند مواد شیمیایی مانند دی اکسید نیتروژن ( NO2 ) وآمونیاک ( NH3 ) را آشکارکنند. هدایت الکتریکی یک نانولوله نیمه هادی تک دیواره که درمجاورت ppm200 از NO2 قرارداده می شود، می تواند در مدت چند ثانیه تا سه برابر افزایش یابد و به ازای اضافه کردن فقط 2% NH3 هدایت دو برابر خواهد شد. حسگرهای تهیه شده ازنانولوله های تک دیواره دارای حساسیت بالایی بوده ودردمای اتاق هم زمان واکنش سریعی دارند. این خصوصیات نتایج مهمی درکاربردهای تشخیصی دارند.
ب) نانولوله های کربنی به عنوان حسگرهای مکانیکی:
هنگامی که یک نانولوله توسط جسمی به سمت بالا یا پائین حرکت می کند، هدایت الکتریکی آن تغییر می یابد. این تغییر در هدایت الکتریکی، با تغییر شکل مکانیکی نانولوله کاملا ً متناسب است. این اندازه گیری به وضوح امکان استفاده از نانولوله ها را به عنوان حسگرهای مکانیکی نشان می دهد. یا می توان با استفاده از مواد واسط مانند پلیمرها در فاصله ی میان نانولوله های کربنی وسیستم، نانولوله های کربنی را برای ساخت بیوحسگرها توسعه داد. شبیه سازی های دینامیکی نشان می دهد که برخی پلیمرها مانند پلی اتیلن می توانند به صورت شیمیایی با نانولوله کربنی پیوند یابند. همچنین مولکول بنزن نیز می تواند به وسیله ی پیوندهای واندروالس روی نانولوله ی کربنی جذب شود. این تحقیقات کاربردهای بسیار متنوع و وسیع نانولوله ها ی کربنی را نشان می دهد. تحقیق دراین زمینه هنوزدرحال توسعه وپیشرفت است ومطمئنا ً درآینده ای نه چندان دور شاهد به کارگیری آنها درابزارها و صنایع مختلف خواهیم بود.
3.استفاده ازنانو ابزارها درتولید نانوحسگرها:
با استفاده از این حسگرها شناسایی مقادیر بسیار کم آلودگی شیمیایی یا ویروس و باکتری در سامانه ی کشاورزی وغذایی ممکن است. تحقیقات درزمینه ی نانوابزارها جزء پژوهشهای علمی به روز دنیاست.
یکی از نیازهای مهم و اساسی در ارتباط با کنترل آلودگی محیط زیست، پایش مستمرآلودگی هواست. با استفاده از نانوحسگرها پیشرفت مؤثری در زمینه ی کنترل آلودگی هوا صورت گرفته است. یکی از این راهکارها اختراع غبارهای هوشمند می باشد. غبارهای هوشمند مجموعه ای از حسگرهای پیشرفته به صورت نانو رایانه های بسیارسبک هستند که به راحتی ساعتها درهوا معلق باقی می مانند. این ذرات بسیار ریز از سیلیکون ساخته می شوند و می توانند ازطریق بی سیم موجود درخود اطلاعات موجود در خود را به یک پایگاه مرکزی منتقل کنند. سرعت این انتقال حدود یک کیلوبایت در ثانیه است. هم چنین حسگرهایی از جنس نانولوله های تک لایه ساخته شده اند که می توانند مولکولهای گازهای سمی را جذب کنند و همچنین آنها قادر به شناسایی تعداد معدودی از گازهای مهلک موجود درمحیط هستند. محققان معتقدند این نانوحسگرها برای شناسایی گازهای بیوشیمیایی جنگی و آلاینده های هوا کاربرد خواهند داشت.
انتشار و پخش گازهای مهلک و سمی یکی از خطرات روزمره زندگی صنعتی است. متأسفانه هشدار دهندههای موجود در صنعت اغلب بسیار دیر موفق به شناسائی اینگونه گازهای نشتی میشوند. نانوحسگرها که از نانوتیوبهای تک لایه به ضخامت حدود یک نانومتر ساخته شدهاند و میتوانند مولکولهای گازهای سمی را جذب کنند. آنها همچنین قادر به شناسائی تعداد معدودی از مولکولهای گازهای مهلک در محیط هستند. محققان مدعیاند که این حسگرها برای شناسائی به هنگام گازهای بیوشیمیائی جنگی، آلایندههای هوا و حتی مولکولهای آلی موجود در فضا کاربرد خواهند داشت.
به طور صریح این قبیل مزایای نانوحسگرها باعث شده است که به عنوان فرصتی وسوسهانگیز برای بازار تلقی شوند. نانوحسگرها به طور ذاتی کوچکتر و حساستر از سایر حسگرها میباشند. همچنین این ظرفیت را دارند که قیمت تمام شدة آنها کمتر از قیمت تمامشده حسگرهای موجود در بازار باشد.
برای مثال اگر قیمت حسگرهای صنعتی متداول امروزی، چند 10 هزار دلار باشند برای نانوحسگرهایی که بتوانند همان کار را انجام دهند به صورت نظری چند 10 دلار برآورد میشود. نانوحسگرها همچنین هزینه جاری را نیز کاهش میدهند؛ زیرا به طور ذاتی برق کمتری مصرف میکنند.
درنهایت از آنجایی که نانوحسگرها هزینههای خرید و اجرا را کاهش میدهند؛ ممکن است بهکارگیری آنها به صورت آرایهها و تودهها مقرون به صرفه باشد و همچنین بتوانند به شکل فراگیر و حتی اضافی در قطعات کاربرد پیدا کنند؛ به طوریکه اگر یک نانوحسگر از کار بیفتد و از مدار خارج شود بتوان از آن صرف نظر کرد و ضریب امنیت در حد مطلوبی باقی بماند، زیرا تعداد زیادی نانوحسگر دیگر در سیستم میتوانند کار آن را به عهده بگیرند.
در بخش نظامی و امنیت ملی نیز احتیاج به حسگرهای بسیار حساسی است که بتوانند به صورت گسترده توزیع شوند تا به کمک آنها بتوان تشعشعات و بیوسمهای زیستی را مورد بررسی قرار داد. در زمینه پزشکی نیاز به حسگرهای بسیار حساسی به صورت آزمایشگاههایی بر روی تراشه است كه بتوانند کوچکترین علائم نشاندهندة سرطان را شناسایی کنند. در صنایع هوافضا احتیاج به نانوحسگرهایی است که در بدنة هواپیماها به عنوان سیستم هشداردهنده ثابت قرار بگیرند و مشخص کنند که چه زمانی هواپیما احتیاج به تعمیرات دارد.
در صنایع اتومبیل میتوان از نانوحسگرها برای مصرف بهینه سوخت استفاده کرد. همچنین در اتومبیلهای گرانقیمت میتوان برای بهبود وضعیت صندلی و وضعیت کنترلهای موجود به تناسب حالتهای مختلف بدن، این نانوحسگرها را مورد استفاده قرار داد.
می توان انتظار داشت که در آینده با ترکیب محرک ها و نانوحسگرها بتوان مواد هوشمندی ساخت که در فرآیندهای تولید سیستم های پیچیده نقش های مهمی ایفا کرده و فناوری جدید دیگری را پایه ریزی کنند. گرچه موانعی مانند افزایش قیمت، اطمینان پذیری از تاثیر آنها و نیز اطمینان از کاربرد آنها در زمینه های صلح آمیز نیز باید از سر راه برداشته شوند.
مقدمه:
شايد تا به حال مانيتورهايي مجهز به صفحه نمايش لمسي را ديده باشيد اينگونه صفحه نمايش ها داراي مزيتها و معايبي هستند كه البته در منظورهاي مختلف استفاده از آنها به نفع ماست به عنوان مثال در دستگاه هاي[ATM[3 يا عابر بانك نياز شديدي به اين فناوري احساس مي شود.كار با اين دستگاهها بدين صورت است كه كاربر بسته به اينكه صفحه لمسي با چه فناوري ساخته شده نقطه ي مورد نظر كه نمايش يك كليد يا لينك مي باشد را توسط قلم مخصوص يا انگشت لمس كرده و فرمان لازم يا درخواست خود را وارد سيستم مي كند.همانطور كه مي دانيد از مانيتور هميشه به عنوان يك دستگاه خروجي ياد مي شد حال با افزودن Touch Screen به آن، مي تواند جاي موشواره[4] يا صفحه كليد را گرفته و به عنوان يك دستگاه وروردي/خروجي به كار رود.
مزاياي صفحه لمسيرايانه هاي مجهز به صفحه لمسي داراي سه مزيت زير هستند:
فضاي كمي اشغال مي كنند
قسمتهاي متحرك كمتري دارند
مي توان از آنها به عنوان يك دستگاه ثابت و جمع و جور در يك نقطه استفاده كرد.
انواع صفحه لمسي از لحاظ طريقه نصبصفحه لمسي ها به دو شيوه در مانيتور ها استفاده مي شوند:
Built-in
Add-on
در روش Built-in هنگامي كه مانيتور در كارخانه توليد مي شود به طور سازماني صفحه لمسي را در آن جاي مي دهند.اينگونه صفحه لمسي ها مخصوص كارهاي سنگين خلق شده و مستقيما روي تيوپ [CRT[5 سوار مي شوند.
در روش Add-on صفحه لمسي را مي توان بعدا روي مانيتور ها اضافه كرد.اينگونه صفحه لمسي ها قابهايي شفاف هستند كه كنترلر آنها در داخل قاب جاسازي شده و روي صفحه ي مانيتور نصب مي شوند.
كاربردهاي صفحه لمسي كيوسكهاي اطلاعاتي از جمله نمايشگر راهنماي توريستي در فرودگاهها و ترمينالهاي مسافرتي مي توانند اطلاعات مربوط به هواشناسي و پروازها را به كاربران يا مردم عادي ارائه دهند، راهنماي عمارتهاي بزرگ كه ممكن است در گوشه و كنار عمارت نصب شده باشند مانند حرمسراها و اماكن زيارتي سياحتي وسيع كه استفاده از آن توسط مبتدي ترين كاربران ميسر باشد، همينطور در موزه هاي بزرگ مي توان براي اطلاع رساني راجع به اجسام موجود در موزه استفاده كرد و .... كه به كارگيري اين ابزار اطلاع رساني بستگي به ابتكار مسئولين مي تواند در جاي خود نقش بسيار موثري داشته باشد.
مكانهاي فروش فوري يا POS[6] ، مثلا باجه هاي بليط فروشي ، بوفه هاي فروش مواد خوراكي ، فروش نشريات و روزنامه ها و ....
سيستمهاي كنترلي اتوماتيك و [PLC[7 ها، در كارخانه هاي توليدي بزرگ براي كنترل دستگاههاي عظيم ، نمايشگر وضعيت دستگاهها حين كار و امكان دخالت دستي در كار دستگاه و ...
اهداف آموزشي ، به خاطر راحتي استفاده از آن مي تواند در يادگيري كاربر موثر باشد به خاطر اينكه كاربر نياز به داشتن اطلاعات مربوط به استفاده از رايانه را ندارد و تمركز بيشتري روي موضاعات مخصوص به خود دارد و ...
به واسطه راحت بودن كار با آنها براي افراد عادي اخيرا تلاشهاي زيادي در جهت استفاده از اين فناوري در سيستمهاي راي گيري[8] شده است مانند انتخابات سراسري.
اجزاء صفحه لمسي
اغلب صفحه لمسي ها از سه جزء زير تشكيل مي شوند:
1) صفحه حساس به لمس كه با توجه به فناوري آن اطلاعات مربوط به مكان لمس شده را به كنترلر مي فرستد.
2) كنترلر صفحه لمسي كه با دريافت سيگنالهاي مخصوص از صفحه لمسي آنها را به علائمي معنا دار براي پردازنده تبديل كرده و از طريق پورت USB يا COM به رايانه منتقل مي كند كه اين علائم معمولا اطلاعات مكان لمس شده روي صفحه مي باشد.
3) يك درايور نرم افزاري براي برقراري ارتباط بين كنترلر و سيستم عامل براي تبديل علائم دريافتي به رويدادهاي موشواره
فناوري هاي موجود صفحه لمسيبسته به كاربرد و محل كار سيستمهاي مجهز به صفحه لمسي فناوريهاي مختلفي وجود دارد كه به ترتيب به ساختار آنها مي پردازيم:
Resistive Touch Screens
همينطور كه از نام اين نوع صفحه لمسي پيداست از مقاومت براي توليد مقادير ولتاژ متفاوت در نقاط مختلف صفحه لمسي استفاده كرده و بدين طريق مكان لمس شده را به كنترلر اعلام مي كند.
اين گونه از صفحه لمسي ها به هر نوع فشاري حساس هستند و پاسخ مورد نظر را در خروجي توليد مي كنند يعني از هر وسيله اي اعم از قلم و انگشت مي توان براي كار با آنها استفاده كرد و از اين لحاظ محدوديتي براي كاربران بوجود نمي آورند.آنها معمولا داراي مواد پايه ي شيشه يا آكرليك كه با لايه هايي از مواد هادي و مقاومتي پوشيده شده اند ،هستند اين لايه هاي نازك توسط نقاط غيرقابل مشاهده اي از هم جدا شده اند وقتي كه صفحه لمسي در حالت عادي و روشن است هيچ گونه تماسي بين دو لايه ي هادي و مقاومتي وجود نداشته و هيچ جرياني بين آن دو رد و بدل نمي شود به محض اينكه لمسي اتفاق بيفتد فشار حاصل از لمس باعث تماس بين دو لايه هادي و مقاومتي خواهد شد و باعث ايجاد تغيير در جريان الكتريكي مي شود اين تغيير توسط كنترلر صفحه لمسي كشف شده و با اندكي پردازش روي اطلاعات حاصل از لمس ، آنها را تبديل به يك مختصات افقي و عمودي مي كند و به عنوان يك رويداد لمس آن را ثبت مي كند.
نوع مقاومتي صفحه لمسي فناوري ساخت ساده اي دارند ولي وضوح تصويري كه به كاربران ارائه مي دهند نسبت به ديگر انواع كمتر است.همچنين به خاطر پايا و پر عمر بودن آنها بيشتر به منظور كارهاي سنگين در مكانهاي نامساعد استفاده مي شوند.

طرز كار يك صفحه لمسي در شكل زير همراه با توضيحات مرحله به مرحله آمده است:
1- پرده ي نازكي از پولي استر
2- لايه مقاومتي فوقاني
3- پوشش هادي و شفاف فلزي
4- لايه مقاومتي پاييني
5- نقاط جدا كننده
6- زيرلايه اي از جنس شيشه يا آكرليك
7- عمل لمس موجب اتصال دو لايه مقاومتي فوقاني و پاييني مي شود
8- كنترلر صفحه لمسي كه اختلاف پتانسيل بين دو لايه مقاومتي محل اتصال را گرفته و به مقادير ديجيتالي X و Y تبديل مي كند.
انواع صفحه لمسي هاي مقاومتي را اجمالاًمرور مي كنيم:
4-Wire Resistive Technology
اينگونه از صفحه لمسي هاي مقاومتي بيشتر در خانه،مدرسه،مراكز فروش اتوماتيك و محيطهاي متنوع ديگر استفاده مي شوند ولي وضوح تصوير خوبي ندارند و براي نمايشگرهاي با سايز كمتر از 10.4 اينچ استفاده مي شوند.
5-Wire Resistive Technology
پايداري اين نوع از نوع 4-Wire بيشتر است ولي وضوح تصوير خوبي ندارد.
8-Wire Resistive Technology
براي نمايشگرهاي بيشتر از 10 اينچ استفاده مي شوند و سرعت و دقت بيشتري نسبت به انواع 4-wire و 5-wire آن دارند.
مزايا:بالا بودن دقت در تعيين نقطه لمس شده
بسيار حساس به فشار از سوي هر گونه شيء خارجي
كارايي خود را به واسطه وجود عناصري چون آب،گرد و غبار،نور و كثيفي از دست نمي دهد
ارزان قيمت و قابل دسترس
معايب:وضوح تصوير 75 درصدي
آسيب پذيري لايه هاي مقاومتي در مقابل اشياء تيز و نوك دار
Infrared
اين نوع از صفحه لمسي ها توسط فناوري انقطاع پرتوي نور پايه ريزي شده اند.به جاي استفاده از لايه هاي مختلف،از يك قاب حاوي يك برد مداري استفاده مي شود كه بر روي آن اپتو الكترونيك[9] و IR[10] سوار شده در حقيقت اين قاب يك جدول سراسري نوري است در يك طرف ديودهاي ساطع كننده ي نور و در طرف ديگر تعدادي سنسورهاي دريافت كننده نور قرار گرفته است.
استفاده مي شود كه بر روي آن اپتو الكترونيك[9] و IR[10] سوار شده در حقيقت اين قاب يك جدول سراسري نوري است در يك طرف ديودهاي ساطع كننده ي نور و در طرف ديگر تعدادي سنسورهاي دريافت كننده نور قرار گرفته است.
زماني كه رويداد لمس اتفاق مي افتد در محل لمس شده سنسورهاي دريافت كننده ،ديگر نوري دريافت نمي كنند يا به عبارتي يك وقفه در دريافت نور ايجاد شده كه از همين تغيير در سنسورهاي دريافت كننده ،در جهت كشف مختصات مكان لمس شده استفاده مي شود.
صفحه لمسي هاي نوري از جهت طول عمر و پايداري در برابر ناملايمتهاي محيط خارج مقاوم هستند همچنين سنسورهاي آنها فقط در صورت آسيب فيزيكي از كار مي افتند و در طولاني مدت فرسوده نمي شوند.
Surface Acoustic Wave (SAW)
اين فناوري يكي از پيشرفته ترين گونه ها در صفحه لمسي هاست و بيشتر شبيه به انواع نوري هستند ولي به جاي پرتوهاي نوري از امواج صوتي استفاده مي كنند.دو موج صوتي كه يكي از سمت چپ و ديگري از بالاي صفحه نمايش سرچشمه مي گيرند روي صفحه نمايش حركت مي كنند و در طرف مقابل ،هر موج توسط سنسورهاي گيرنده دريافت مي شود.زماني كه صفحه لمسي توسط انگشت لمس مي شود در نقطه لمس شده،امواج جذب مي شوند و باعث ايجاد تاخير در ،دريافت موج توسط گيرنده مي شود كه مدت زمان تاخير بوجود آمده، نشان دهنده ي عمق فشار وارد شده مي باشد از اين رو اين گونه از صفحه لمسي ها برخلاف انواع ديگر قادر به تشخيص ميزان فشار وارده يا به عبارتي عمق لمس شده Z-axis هستند هرچه فشار بيشتري با انگشت وارد شود موج بيشتر جذب مايعات انگشت شده و تاخير در رسيدن موج بيشتر مي شود.
جنس اين صفحه لمسي ها شيشه اي است و بهمين خاطر هيچ وقت فرسوده نخواهد شد و طول عمر زياد و وضوح تصوير خوبي خواهد داشت.
اين فناوري بيشتر براي رايانههاي آموزشي و كيوسكهاي اطلاعاتي در محيطهاي شلوغ استفاده مي شود.
مزايا:بالا بودن دقت در تعيين نقطه لمس شده
بالا بودن وضوح تصوير
جنس شيشه اي و عدم نياز به لايه هاي مختلف براي محافظت
معايب:حتما بايد توسط انگشت يا قلمهاي نرم يا خودكار بدون جوهر لمس شود
ممكن است به واسطه وجود گرد و غبار،آب و كثيفي آسيب ببيند
Capacitive
اين نوع صفحه لمسي ها از يك پنل شيشه اي حاوي يك عنصر خازني كه ذخيره كننده بار الكتريكي است تشكيل شده است.
برخلاف ساير صفحه لمسي ها در اين فناوري شيء لمس كننده بايد هادي جريان الكتريكي باشد مانند سر انگشت بدون پوشش يا يك قلم هادي الكتريسيته
زماني كه صفحه نمايش با يك شيء هادي مناسب لمس شود جريان الكتريكي از سوي گوشه هاي صفحه لمسي به سمت نقطه تماس، جاري مي شود اين رويداد باعث مي شود تا مدارهاي نواسانسازي كه در گوشه هاي صفحه لمسي قرارگرفته اند فركانس خود را با توجه به نقطه تماس تغيير بدهند اين تغيير فركانس ،اندازه گيري شده و به تعيين مختصات نقطه لمس شده كمك مي كند.
اين گونه از صفحه لمسي ها بسيار مقاوم هستند و وضوح تصوير عالي دارند به همين خاطر در پهنه وسيعي از كاربردهاي مختلف مورد استفاده قرار مي گيرند.
مزايا:بالا بودن دقت در تعيين نقطه لمس شده
بالا بودن وضوح تصوير
مقاوم در برابر رطوبت،چربي و كثيفي
معايب:فقط با انگشت بايد آن را لمس كرد و با اشياء غير هادي كار نمي كند.
نتيجه:علاوه بر كاربردهايي كه قبلا توضيح داده شد در آينده سيستم راي گيري يا انتخابات، هم به كاربردهاي صفحه لمسي اضافه خواهد شد.در تصوير 3 نمونه اي از يك سيستم راي گيري را مشاهده خواهيد كرد.
نكات سودمندي كه باعث شده تا انتخابات هم از سيستم هاي صفحه لمسي بي بهره نماند از اين قرار است:
- راحتي استفاده از اينگونه سيستمهاي لمسي ،از اين جهت كه راي دهندگان شامل تمام اقشار جامعه با توانايي هاي مختلف هستند.
- اشتباهات در ثبت آراء به حداقل مي رسد
- عمل شمارش به سرعت پايان مي يابد
- فرمهاي راي گيري را مي توان به چند زبان براي راي دهندگان نمايش داد
- دسترسي آسان و سريع به آراء ماخوذه
در پايان تصاويري از دستگاههاي مجهز به صفحه لمسي به منظور آشنايي با حوزه كاري هر كدام آورده شده كه توجه شما را به آنها جلب مي كنم:

مراجع :
http://www.elotouch.com
http://www.co.alameda.ca.us
http://www.touchscreens.com
http://www.vartechsystems.com
http://www.tridentdisplays.nl
http://www.touchwindow.com
http://www.chassis-plans.com
http://www.ftgdata.com
http://www.ceroview.com
http://www.3mtouch.com
يادداشتها
[1] Touch Screen Technologies
[2] Surface Acoustic Wave سطوحي با امواج صوتي كه يكي از انواع صفحه لمسي هاست
[3] Automated Teller Machine دستگاههاي خودپرداز در بانكها
[4] Mouse
[5] Cathode Ray Tube همين مانيتورهاي معمولي كه به روش پرتاب الكترون كار مي كنند
[6] Point Of Sale مراكز فروش كه به صورت رايانهاي كارمي كنند
Programmable Logic Controller [7]كنترلرهايي با منطق قابل برنامه ريزي در اتوماسيون صنعتي
[8] Voting Systems
[9] عمل سخت افزاري براي تبديل سيگنالهاي الكتريكي به اشعه هاي نوري
[10] فناوري مورد استفاده براي كنترل از راه دور تلويزيون ها يا فناوري انتقال اطلاعات بين دو جسم جدا از هم توسط نور
در زیر با نحوه های مختلف بستن مدارات آپ امپی آشنا می شوید.
با توجه به اینکه  زمین شده است. بنابراین
زمین شده است. بنابراین  است.در حالت ایده آل
است.در حالت ایده آل  است.در نتیجه
است.در نتیجه  می شود.
می شود.
با توجه به بالا بودن مقاومت ورودی آپ امپ در پایه منفی و با توجه به قوانین گره می توان نتیجه گرفت.  (منظور از IZ1 جریان امپدانس یا مقاومت Z1 می باشد)
(منظور از IZ1 جریان امپدانس یا مقاومت Z1 می باشد)
می شود.در واقع در اینجا فرض کردیم IZ1 جریان وارد شونده به گره موجود در پایه منفی آپ امپ است.و IZ2 جریان خارج شونده از این گره است.
با توجه به قانون اهم و جهت جریان و صفر بودن جریان ورودی در آپ امپ رابطه زیر را برای IZ1 و IZ2 داریم. 


با توجه به فرمول فوق و تساوی IZ1 و IZ2 رابطه زیر بدست می آید. 
در این فرمول خروجی ضریب منفی یا برعکس شده ورودی است.
اگر مقاومت فیدبک و مقاومت ورودی یکسان باشند.،مقدار گین برابر منفی یک می شود.در این حالت آپ امپ به صورت یک بافر NOT یا معکوس عمل می کند.
 |
در این حالت برعکس حالت قبلی تحریک آپ امپ از پایه مثبت صورت می گیرد.همانطور که در شکل زیر مشخص است. است.
است.
با توجه به هم پتناسیل بودن پایه های ورودی منفی و مثبت در حالت ایده آل داریم 
با در نظر گرفتن قانون اهم  در مورد جریان IZ2 رابطه زیر را داریم
در مورد جریان IZ2 رابطه زیر را داریم 
همانطور که دیدید  می باشد.در نتیجه فرمول فوق به صورت زیر ساده می شود.
می باشد.در نتیجه فرمول فوق به صورت زیر ساده می شود. 

با توجه به قوانین گره و صفر بودن جریان ورودی آپ امپ در حالت ایده آل و روابط فوق رابطه زیر را داریم 
با ساده کردن رابطه فوق داریم  در این حالت خروجی مضرب مثبتی از ورودی است.
در این حالت خروجی مضرب مثبتی از ورودی است.
 |
در یک آپ امپ ایده آل که به صورت زیر بسته شود.ولتاژ ورودی VS با ولتاژ خروجی برابر می شود.در این حالت به دلیل امپدانس بالای ورودی در آپ امپ ها ولتاژ خروجی با وجود برابری با ولتاژ ورودی ولی کاملا از جریان ورودی مجزا یا ایزوله شده است.
مقدار ولتاژ خروجی از فرمول زیر تبعیت می کند.
همانطور که گفته شد.،در آپ امپ ایده آل
همانطور که در نقشه ملاحظه می کنید. در این حالت جریان از پایه مثبت به پایه منفی می رود.،و از آنجا به خروجی می رود.در این حالت  می شود.و در نهایت
می شود.و در نهایت 
 |
در این حالت جریان ایجاد شده در بار مقاومتی متناسب با ولتاژ ورودی است.به دلیل مقاومت ورودی بسیار بالا در آپ امپ ها می توان از جریان ورودی آپ امپ ها صرفنظر کرد.بنابراین جریان خروجی از رابطه زیر محاسبه می شود. 
 |
از این مدار جهت تقویت جریانهای خیلی کوچک در حد میکرو آمپر و تبدیل آن ها به ولتاژ های مناسب و خیل بیشتر از میکرو استفاده می شود.
با استفاده از فرمول زیر می توانید.مقدار ولتاژ خروجی را محاسبه کنید. 
 |


همانطور که در شکل زیر مشاهده می کنید.مسیر فیدبک توسط دیود ایجاد می شود.اگر شکل موج ورودی سینوسی باشد.این شکل موج را با عبارت Vin در کنار شکل می توانید در شکل بالا مشاهده کنید.خروجی این آپ امپ در حالتی که ولتاژ ورودی در سیکل منفی باشد.،نزدیک به صفر است.که با صرفنظر کردن از این مقدار نزدیک به صفر آنرا صفر در نظر می گیرند.
در این حالت ولتاژ های کمتر از ولتاژ هدایت دیود را از سیگنال ورودی در حالت عملی در خروجی نخواهیم داشت.
 |
همانطور که در شکل زیر مشاهده می کنید.زمانیکه لبه بالارونده پالس را در ورودی منفی این آیسی داشته باشیم.، ولتاژ در پایه منفی بیشتر از ولتاژ در پایه مثبتی است.که زمین شده است.در این حالت آپ امپ به صورت معکوس کننده عمل می کند.
همانطور که می دانید.انتگرال شکل موج مربعی به صورت مثلثی است.شیب این شکل موج در لبه بالا رونده منفی و در لبه پایین رونده مثبت می شود.
می توانید شکل موج مربعی را توسط آیسی 555 ایجاد کنید.و شکل موج مثلثی را در اسیلسکوپ ببینید.
در حالت ایده آل همانطور که می دانید.
با توجه به قوانین مربوط به گره،جریان های وارد شونده به یک گره با جریان های خارج شونده از گره برابر هستند.این قانون تحت عنوان kcl نامیده می شود.بنابراین رابطه زیر را خواهیم داشت. 
همانطور که گفته شد به دلیل مقاومت ورودی بالا در آپ امپ می توانید از جریات  صرفنظر کنید.
صرفنظر کنید.
بنابراین رابطه بالا به صورت زیر ساده می شود. 
با توجه به قانون اهم جریان گذرنده از مقاومت IR1 به این صورت به دست می آید. با توجه ب اینکه در حالت ایده آل و برابر صفر است. می شود.
با توجه ب اینکه در حالت ایده آل و برابر صفر است. می شود.
و رابطه مربوط به جریان در بالا به این صورت ساده می شود.
رابطه مربوطه به جریان خازن به صورت زیر می باشد.در این رابطه جریان خازن با حاصلضرب ظرفیت خازن بر حسب فاراد در مشتق زمانی ولتاژ خازن بدست می آید. 
بر اساس این رابطه و جهت جریان عبارت مربوط به جریان خازن به صورت زیر به دست می آید. 
با توجه به صفر بودن  رابطه بالا به صورت روبرو ساده می شود.
رابطه بالا به صورت روبرو ساده می شود.
بنابر روابط مربوط به kcl که گفته شد.رابطه زیر را خواهیم داشت.  با ساده کردن این رابطه خواهیم داشت.
با ساده کردن این رابطه خواهیم داشت.
همانطور که می دانید.انتگرال از مشتق برابر خود عبارت می شود.پس برای بدست آوردن خروجی از دو طرف تساوی انتگرال می گیریم.
در این حالت خروجی برابر انتگرال حاصل تقسیم ورودی بر حاصلضرب مقاومت در ظرفیت خازن خواهد شد.
در این حالت اگر شکل موج ورودی به صورت مربعی باشد شکل موج خروجی به صورت مثلثی خواهد بود.
 |
اگر در محل اتصال خازن با پایه 2 آپ امپ مطابق شکل از قوانین مربوط به kcl استفاده کنید.همانطور که می دانید بر اساس قوانین kcl جریان های وارد شونده به یک گره با جریان های خارج شونده از گره برابرند.در این گره ای که مطرح شد.،3 جریان وجود دارد.،یک جریان را جریان خازن در نظر بگیرید.،که به گره وارد می شود.دو جریان دیگر از گره خارج می شوند.یک جریانی که وارد پایه منفی آپ امپ می شود.و جریانی که وارد مقاومت R2 در خروجی می شود.بنابراین فرمول زیر را خواهیم داشت. 
به دلیل مقاومت ورودی بالا در آپ امپ و در حالت ایده آل می توانیم از جریان در پایه منفی آپ امپ صرفنظر کنیم بنابراین داریم
در واقع بنابر فرمول زیر همان جریانی که از خازن در ورودی می گذرد وارد خروجی نیز می شود. 
فرمولی که می توان در مورد جریان خازن وجود دارد.به صورت زیر است.
در این فرمول c ظرفیت خازن بر حسب فاراد است.t نیز در این عبارات بیانگر این است.که این فرمول بر حسب زمان می باشد.
d/dt نیز همانطور که می دانید علامت مشتق گیری است.بنابراین جریان گذرنده از خازن از حاصلضرب ظرفیت خازن در مشتق زمانی ولتاژ بدست می آید. 
جریان گذرنده از مقاومت فیدبکی R2 نیز از رابطه زیر محاسبه می شود. 
در حالت ایده آل می باشد.بنابراین 
بنابر روابط فوق راطه زیر را خواهیم داشت. 
با ساده کردن عبارت فوق خواهیم داشت.همانطور که می بینیدخروجی از مشتق ورودی حاصل می شود. 
در شکل مثلثی ورودی مربوط به مشتق گیر.،هر جا که شیب خط مثلثی شکل زاویه ای حاده باشد لبه بالا رونده پالس را خواهیم داشت.،و هر جا که این زاویه منفرجه یا باز باشد.لبه پایین رونده پالس را خواهیم داشت.
اگر شکل موج ورودی سینوسی باشد.مشتق آنرا در نظر بگیرید.وسپس به خاطر علامت منفی که در فرمول بدست آوردید.آنرا معکوس کنید. 
علامت منفی این عبارت با منفی فرمول بالا مثبت می شود.بنابراین در این حالت شکل موج خروجی همسان با شکل موج ورودی و جلوتر از آن ایجاد می شود.علت جلوتر بودن آن ضریب a است.که در مشتق مشاهده می کنید.این شکل موج ها را براحتی می توانید در اسیلسکوپ مشاهده کنید.
اگر شکل موج ورودی مربعی باشد.،همانطور که می دانید مشتق تابع پله ای تابع ضربه ای می شود .بنابراین در خروجی هنگامیکه لبه بالارونده پالس وجود داشته باشد.، یک پالس نوک تیز به سمت بالا خواهیم داشت.و هنگامیکه لبه پایین رونده پالس را داشته باشیم.این پالس نوک تیز به سمت پایین خواهد بود.
 |
با توجه به مقاومت ورودی بالا در آپ امپ جریان هر یک از مقاومت ها در ورودی و جریان خروجی از رابطه زیر بدست می آید.علامت منفی نیز به خاطر این است که تحریک ولتاژ از پایه منفی صورت گرفته است. 
اگر مقاومت های R1،R2 و R3 با یکدیگر برابر باشند.فرمول بالا به صورت زیر محاسبه می شود. 
 |
اگر آپ امپ را ایده آل فرض کنید.در واقع مقاومت ورودی آنرا بی نهایت و ولتاژ در دو پایه مثبت و منفی آنرا یکسان در نظر بگیرید. روابط زیر را جهت محاسبه ولتاژخروجی خواهیم داشت.
مقدار ولتاژ در مقاومت R3 به صورت زیر محاسبله می گردد.در اینجا از قانون تقسیم ولتاژ در مقاومت های سری استفاده شده است.اگر به شکل نگاه کنید.این دو مقاومت سری نیستند. اما به دلیل بالا بودن مقاومت وردی آپ امپ و صفر بودن جریان ورودی می توان دو مقاومت را سری در نظر گرفت. 
همانطور که در شکل می بینید.
و همانطور که گفته شد.در حالت ایده آل است.بنابراین همانطور که در شکل می بینید  است.
است.
از روابط گفته شده می توان نتیجه گرفت.،که  است.
است.
با توجه به اینکه جریان های وارد شده یه یک گره با جریان خارج شونده از آن گره برابر است.،بنابراین اگر شما در شکل زیر گره VA را در نظر بگیرید.جریان خارج شونده از آن به سمت ورودی منفی آپ امپ به دلیل مقاومت بالا ورودی آپ امپ نزدیک به صفر خواهد بود.،که در محاسبات صفر در نظر می گیرند.این کاهش جریان و نزدیکی آن به صفر را می توان با رابطه قانون اهم به راحتی فهمید.  بر اساس این قانون هر چه قدر جریان بیشتر شود.مقاومت کمتر خواهد شد.چرا که همانطور که در فرمول می بینید. می توانید مقاومت را در کسر در زیر ولتاژ بیاورید.و جریان را به صورت مجزا در یک طرف تساوی داشته باشید.حال هر چه قدر مقاومت را بیشتر کنید.این کسر کوچکترمی شود.،و جریان کمتر می شود.
بر اساس این قانون هر چه قدر جریان بیشتر شود.مقاومت کمتر خواهد شد.چرا که همانطور که در فرمول می بینید. می توانید مقاومت را در کسر در زیر ولتاژ بیاورید.و جریان را به صورت مجزا در یک طرف تساوی داشته باشید.حال هر چه قدر مقاومت را بیشتر کنید.این کسر کوچکترمی شود.،و جریان کمتر می شود.
با توجه به مسایل گفته شده جریان در مقاومت R1 برابر 
جریان در مقاومت R3 نیز از رابطه زیر بدست می آید 
با توجه به قوانین مربوط به گره اگر هر دو جریان را وارد شونده به گره VA در نظر بگیرید.رابطه زیر را خواهیم داشت. 
با ساده کردن این رابطه و جاگذاری VA با عبارت مربوط به VR3 که مساوی VA بدست آمد.رابطه نهایی زیر را خواهیم داشت. 
اگر دو مقاومت R1 و R3 با یکدیگر مساوی باشند.رابطه زیر را خواهیم داشت.،که بیانگر عمل تفریق است. 
در بيشتر ماشين آلات صنعتي ، سيستمهاي تاخيري و شمارنده ها نيز استفده مي گرديد و با اضافه شدن تعدادي Timer و شمارنده به تابلوهاي کنترل , حجم و زمان مونتاژ آن افزايش مي يافت .
اشکال فوق با در نظر گرفتن استهلاک و هزينه بالاي خود و همچنين عدم امکان تغيير در عملکرد سيستم ، باعث گرديد تا از دهه 80 ميلادي به بعد اکثر تابلوهاي فرمان با سيستمهاي کنترلي قابل برنامه ريزي جديد يعني PLC جايگزين گردند .در حال حاضر PLC يکي از اجزاي اصلي و مهم در پروژه هاي اتوماسيون مي باشد که توسط کمپانيهاي متعدد و در تنوع زياد توليد و عرضه ميگردد .
به طور خلاصه سيستمهاي نوين اتوماسيون و ابزار دقيق مبتني بر PLC در مقايسه با کنترل کننده هاي رله اي و کنتاکتوري قديمي داراي امتيازات زير است :
۱- هزينه نصب و راه اندازي آنها پايين مي باشد.
۲- براي نصب و راه اندازي آنها زمان کمتري لازم است .
۳- اندازه فيزيکي کمي دارند.
۴- تعمير و نگه داري آنها بسيار ساده مي باشد.
۵- به سادگي قابليت گسترش دارند .
۶- قابليت انجام عمليات پيچيده را دارند.
۷- ضريب اطمينان بالايي در اجراي فرايندهاي کنترلي دارند .
۸- ساختار مدولار دارند که تعويض بخشهاي مختلف آن را ساده ميکند.
۹- اتصالات ورودي ، خروجي و سطوح سيگنال استاندارد دارند.
۱۰- زبان برنامه نويسي آنها ساده و سطح بالاست.
۱۱- در مقابل نويز و اختلالات محيطي حفاظت شده اند.
۱۲- تغيير برنامه در هنگام کار آسان است.
۱۳- امکان ايجاد شبکه بين چندين PLC به سادگي ميسر است .
۱۴- امکان کنترل از راه دور (به عنوان مثال از طريق خط تلفن يا ساير شبکه هاي ارتباطي ) قابل حصول است .
۱۵- مکان اتصال بسياري از تجهيزات جانبي استاندارد از قبيل چاپگر ، بارکد خوان و ... به PLC ها وجود دارد .

با این راهنمای جامع، به دنیای شگفتانگیز ترانس برق منزل قدم بگذارید، با انواع مختلف آن، نحوه انتخاب و نصب ترانس مناسب، و نکات مهم نگهداری و تعمیر آن آشنا شوید و از برق پایدار و ایمن در خانه خود لذت ببرید! ترانس برق منزل، دستگاهی است که ولتاژ برق ورودی را به ولتاژ مورد ... ...

با این راهنمای جامع، به دنیای شگفتانگیز سرویس چکش برق قدم بگذارید، با انواع آن، نحوه انتخاب و نصب، و نکات ایمنی کار با آن آشنا شوید و با خیالی آسوده از برق در خانه و محل کار خود لذت ببرید! چکش برق، وسیلهای حیاتی برای محافظت از جان و اموال در برابر خطرات ناشی از برق ... ...
با این راهنمای جامع، به دنیای شگفتانگیز الکترونیک قدم بگذارید، با مفاهیم و اصول اساسی برق و مدار آشنا شوید و با به کارگیری این دانش، به ساخت و راهاندازی تجهیزات الکترونیکی بپردازید! الکترونیک، علم مطالعه و کاربرد پدیدههای الکتریکی و مغناطیسی است. این علم پایه و ... ...

با این راهنمای جامع، به دنیای شگفتانگیز سکسیونرهای فشار قوی قدم بگذارید، با انواع مختلف آنها، نحوه عملکرد و کاربردهایشان آشنا شوید و با انتخاب و استفاده صحیح از آنها، ایمنی و کارایی شبکههای برق را ارتقا دهید! سکسیونرها، کلیدهای قطع و وصل جریان الکتریکی در شبکههای ... ...

با این راهنمای جامع، به دنیای شگفتانگیز انتخاب ترانسفورماتور قدم بگذارید، با انواع مختلف ترانسفورماتور، کاربردها و ویژگیهای آنها آشنا شوید و با انتخابی درست و مطمئن، از این دستگاههای پرکاربرد در صنعت و زندگی روزمره، به طور بهینه استفاده کنید! ترانسفورماتور، یکی از ... ...
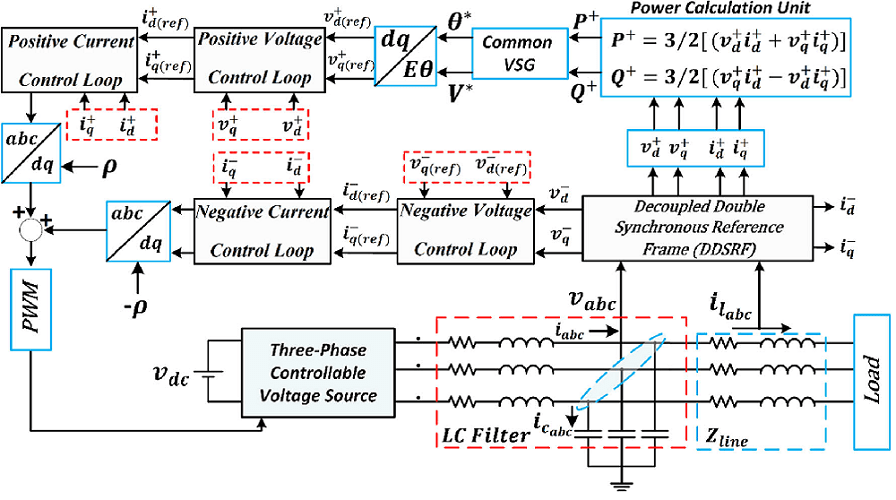
مبدل های قدرت در دهه گذشته کاربردهای زیادی در صنعت برق پیدا کرده اند. ژنراتور سنکرون مجازی (VSG) یک نمونه واقعا موثر از این مبدل ها است که می تواند برای القای دینامیک مورد نظر به شبکه استفاده شود. علیرغم عملکرد عالی VSGها در شرایط متعادل، آنها انعطاف پذیری لازم برای حذف ... ...
آشنايي با جريان سه فاز جريان سه فاز در مداري كه سيم بندي القاء شونده آن (آرميچر) از سه دسته سيم پيچ جدا كه هر كدام نسبت به هم 120 درجه الكتريكي اختلاف فاز دارند تهيه مي شود. انواع اتصال در سيستم سه فاز . در سيستم سه فاز معمولاً از سه نوع اتصال استفاده مي شود : الف- اتصال ستاره ب- ...
با این راهنمای جامع، به دنیای نصب دزدگیر پراید قدم بگذارید، با مراحل و نکات مهم نصب این سیستم امنیتی آشنا شوید و با خیالی آسوده از خودروی خود در برابر سرقت محافظت کنید! امروزه با افزایش آمار سرقت خودرو، نصب دزدگیر به یکی از ضروریترین اقدامات برای حفظ امنیت خودرو ... ...
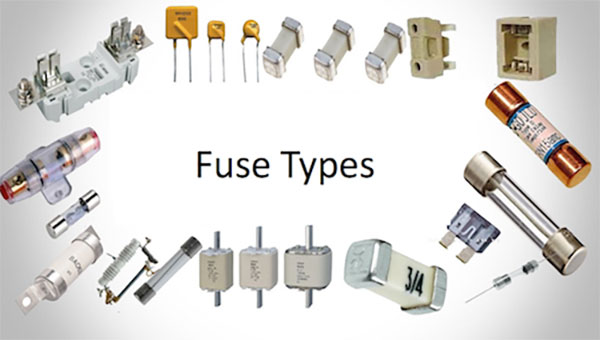
با این راهنمای جامع، به دنیای شگفت انگیز فیوزها قدم بگذارید، انواع مختلف آنها را بشناسید، با نحوه کار و عملکرد آنها آشنا شوید و با انتخاب و استفاده صحیح از فیوزها، از تجهیزات و لوازم برقی خود در برابر خطرات ناشی از اضافه بار و اتصال کوتاه محافظت کنید! فیوزها، یکی از ... ...

با این راهنمای جامع، به دنیای شگفتانگیز سیم پیچی دینام قدم بگذارید، با اصول و مراحل سیم پیچی انواع مختلف دینام آشنا شوید و با به کارگیری دانش و مهارت خود، به تعمیر و بازسازی دینام خودرو و سایر تجهیزات برقی بپردازید! دینام، یکی از اجزای حیاتی سیستم برق خودرو است که ... ...

با این راهنمای جامع، به دنیای شگفتانگیز ساخت لامپ قدم بگذارید، با انواع مختلف لامپ، اصول و مراحل ساخت آنها آشنا شوید و با به کارگیری خلاقیت خود، لامپهای منحصر به فرد خود را بسازید! لامپ، یکی از اختراعات بشر است که نقش مهمی در روشنایی محیط و زندگی ما دارد. انواع ... ...
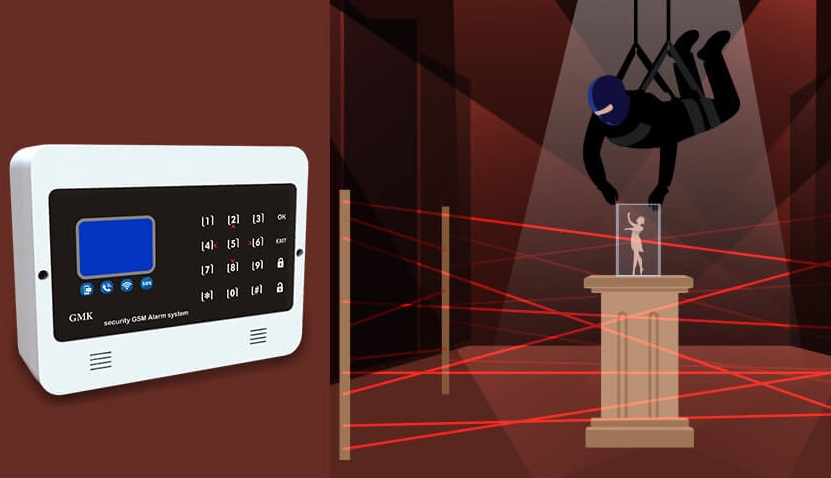
با این راهنمای جامع، به دنیای شگفتانگیز دزدگیرها قدم بگذارید، با انواع مختلف آنها، نحوه نصب و راهاندازی، و نکات امنیتی برای انتخاب و استفاده از دزدگیر آشنا شوید و با خیالی آسوده از منزل، محل کار و داراییهای خود محافظت کنید! در دنیای امروز، امنیت منازل، محل کار و ... ...

با این راهنمای جامع، به دنیای شگفتانگیز کیفیت توان برق قدم بگذارید، با مفاهیم و پارامترهای کلیدی آن آشنا شوید، با روشهای اندازهگیری و آنالیز کیفیت توان برق به طور کامل مسلط شوید و با به کارگیری این دانش، پایداری و کارایی سیستمهای الکتریکی خود را به طور چشمگیری ارتقا ... ...

با این راهنمای جامع، به دنیای شگفتانگیز نقشه خوانی برق صنعتی قدم بگذارید، با انواع نقشهها و علائم آنها آشنا شوید و با تسلط بر این مهارت، به درک عمیقتر از تاسیسات برقی و عیبیابی آنها دست پیدا کنید! نقشه خوانی برق صنعتی، مهارتی ضروری برای هر تکنسین برق و مهندس برق ... ...

با این راهنمای جامع، به دنیای شگفتانگیز سنسورهای حرارتی قدم بگذارید، انواع مختلف آنها را بشناسید، با نحوه عملکردشان آشنا شوید و با استفاده از این ابزارهای کاربردی، دما را در محیطهای مختلف به طور دقیق اندازهگیری کنید! سنسورهای حرارتی، ابزاری هستند که برای ... ...
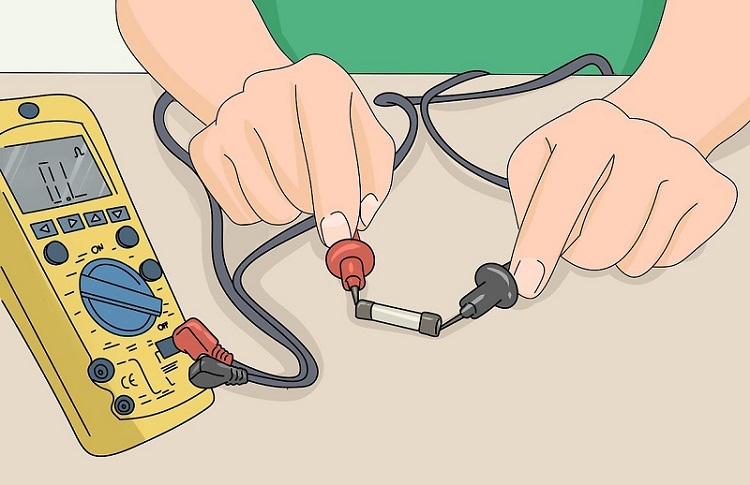
با این راهنمای جامع، به دنیای شگفتانگیز تست الکترونیک قدم بگذارید، با روشها و ابزارهای مختلف تست آشنا شوید و با به کارگیری دانش و مهارت خود، به عیبیابی و تعمیر سریع و دقیق تجهیزات الکترونیکی بپردازید! تست الکترونیک، فرآیندی است که برای بررسی عملکرد صحیح تجهیزات ... ...
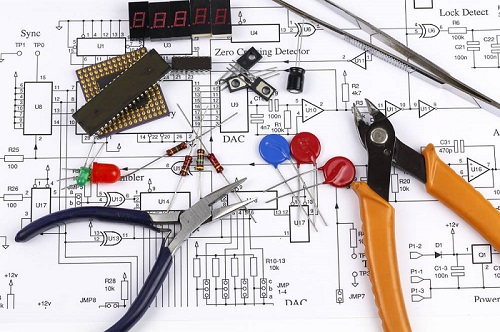
با این راهنمای جامع، به دنیای شگفتانگیز الکترونیک عمومی قدم بگذارید، با مفاهیم و اصول اساسی برق و الکترونیک آشنا شوید و با به کارگیری دانش خود، به دنیای وسیع تجهیزات الکترونیکی و اختراعات شگفتانگیز پا بگذارید! الکترونیک، علم مطالعه و کاربرد جریان الکتریکی و ... ...
با این راهنمای جامع، به دنیای شگفتانگیز اصطلاحات الکترونیکی قدم بگذارید، با مفاهیم و اصطلاحات کلیدی این حوزه آشنا شوید و با درک عمیقتر از این علم، به یک متخصص در زمینه برق و الکترونیک تبدیل شوید! الکترونیک، علم و فناوری مطالعه و کنترل جریان الکتریکی و بار الکتریکی ... ...
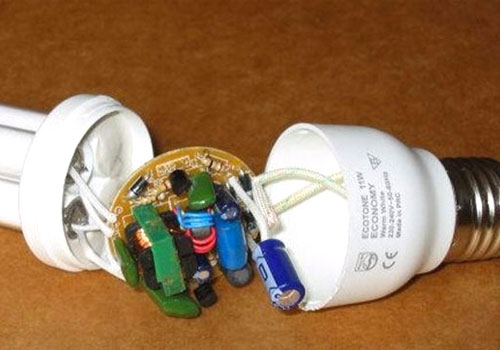
با این راهنمای جامع، به دنیای شگفتانگیز تعمیر لامپهای کم مصرف قدم بگذارید، با عیوب رایج این لامپها آشنا شوید و با یادگیری روشهای ساده تعمیر، به صرفهجویی در مصرف انرژی و حفظ محیط زیست کمک کنید! لامپهای کم مصرف (CFL) به دلیل مصرف انرژی پایین و عمر طولانی، جایگزینی ... ...
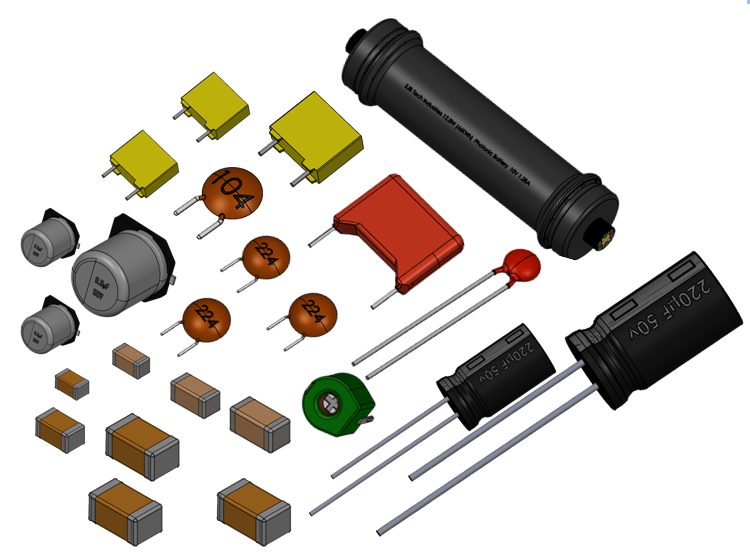
خازن ها، یکی از اجزای اساسی مدارهای الکتریکی و الکترونیکی هستند که وظیفه ذخیره سازی بار الکتریکی را بر عهده دارند. در این راهنمای جامع، به بررسی عمیق خازن ها، از جمله اصول عملکرد، انواع، کاربردها، محاسبات و انتخاب خازن مناسب، می پردازیم. با این راهنما می توانید: اصول ... ...
در دنیای برق و الکترونیک، آشنایی با واحدهای الکتریکی و نحوه تبدیل آنها بین یکدیگر از مهارت های ضروری است. این راهنمای جامع، به شما کمک می کند تا به طور کامل بر تبدیل واحدهای الکتریکی مسلط شوید. در این راهنما، به بررسی موارد زیر می پردازیم: معرفی واحدهای پایه و فرعی ... ...

برق، یکی از مهم ترین اختراعات بشر است که نقش حیاتی در زندگی روزمره ما دارد. با این حال، برق می تواند بسیار خطرناک باشد و در صورت عدم رعایت نکات ایمنی، می تواند منجر به برق گرفتگی، آتش سوزی و سایر حوادث ناگوار شود. در این راهنمای جامع، به بررسی کامل اصول ایمنی در برق، از ... ...

با این راهنمای جامع، به دنیای شگفتانگیز تعمیر نور و چراغ معابر قدم بگذارید، با انواع مختلف چراغها، اصول عیبیابی و تعمیر آنها آشنا شوید و با به کارگیری دانش و مهارت خود، به روشنایی بخشیدن به شهرها و ارتقای ایمنی عبور و مرور کمک کنید! نور و چراغ معابر، نقش حیاتی در ... ...

با این راهنمای جامع، به دنیای نصب کابل برق قدم بگذارید، اصول و الزامات آن را بشناسید، با انواع کابل ها و ابزارهای مورد نیاز آشنا شوید، مراحل نصب را به صورت گام به گام فرا بگیرید و با نصب اصولی کابل برق در منزل یا محل کار خود، از ایمنی و آسایش بیشتری برخوردار شوید! برق، ... ...
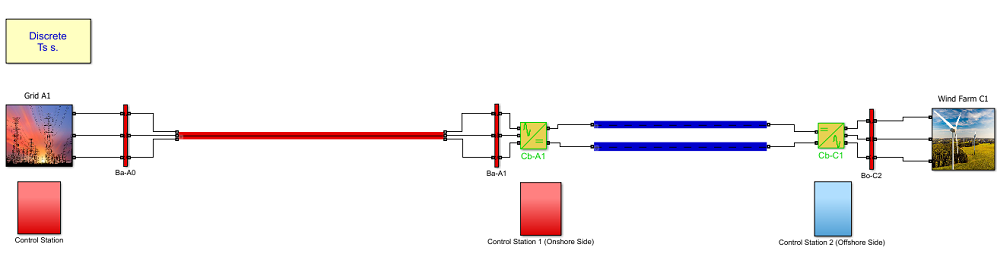
در این پروژه، یک واحد انرژی تجدید پذیر (توربین بادی) از طریق خطوط جریان مستقیم ولتاژ بالا (HVDC) به یک شبکه AC متصل شده است. بدیهی است که از دو مبدل (کانورتر) AC به DC جهت تبدیل پارامترهای الکتریکی استفاده شده است. سیستم های کنترل مبدل ها برای واحد تجدید پذیر و شبکه به ... ...

عنوان پاورپوینت:دانلود پاورپوینت گیاه جینکو بیلوبافرمت: پاورپوینت قابل ویرایشتعداد اسلاید: 17پاورپوینت کامل و آماده ارائهفهرست مطالب:معرفی کوتاهی از گیاه جینکو بیلوباترکیبات شیمیایی اصلیاصلی ترین ترکیب تشکیل دهنده آنمکانیسم عمل جینکو بیلوبااشکال دارویی جینکو بیلوباکاربرد آن ... ...
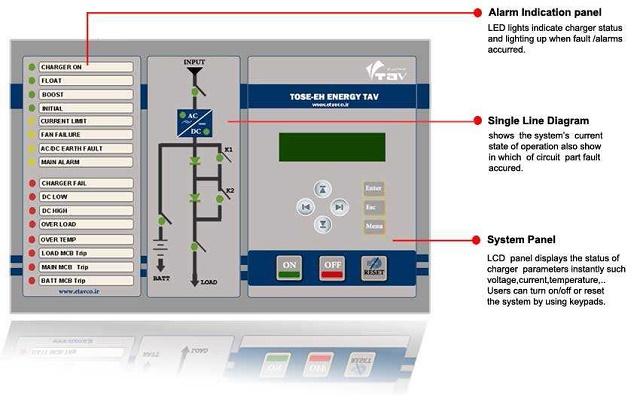
دستگاه های شارژ کننده مطابق با اصول الکتریسیته هستند و جریان برق مستقیم را تبدیل می کنند. جریان مستقیم همیشه یک طرفه است، یا مثبت یا منفی. در این بین فقط ولتاژ کم یا زیاد می شود. باطری ها و تنظیم کننده برق DC را متناسب با جریان تعدیل می کنند. اکثر دستگاه های برقی تبدیل ... ...
شبیه سازی یکسوساز تک فاز تمام موج تریستوری الکترونیک صنعتی یا الکترونیک قدرت شاخه ای از مهندسی برق است که در آن با استفاده از خواص حالت جامد مواد نمیه هادی، توان ها (ولتاژ ها و جریان ها) ی قدرت کنترل یا تبدیل می شوند. بنابراین تمام منابع تغذیه جدید همچون شارژرها، ... ...
نیروگاه سیکل ترکیبی نیروگاهی است که شامل تعدادی توربین گاز و توربین بخار میشود. در این نوع نیروگاه، با استفاده از بویلر بازیاب، از حرارت موجود در گازهای خروجی از توربینهای گاز، برای تولید بخار آب مورد نیاز در توربینهای بخار استفاده میشود. اگر توربین گاز به صورت ...
عنوان مقاله : معرفی تکنولوژی نمایشگرهای OLED قالب بندی: word, PPT صفحات : شرح مختصر : OLED مخفف کلمات (Organic Light Emitting Diode) است و به معنای دیودهای ارگانیکی پخش کننده نور می باشد. با تکنولوژی OLED به زودی شاهد خواهیم بود که صفحات نمایشی ساخته می شوند که با وجود ابعاد بسیار بزرگ، نازک و سبک ...
اگر به یک وب سایت یا فروشگاه رایگان با فضای نامحدود و امکانات فراوان نیاز دارید بی درنگ دکمه زیر را کلیک نمایید.
ایجاد وب سایت یامحبوب ترین ها
پرفروش ترین ها
پر فروش ترین های فورکیا
راهنمای جامع ترانس برق منزل راهنمای جامع سرویس چکش برق راهنمای جامع الکترونیک راهنمای جامع سکسیونرهای فشار قوی راهنمای جامع انتخاب ترانسفورماتور شبیه سازی مقاله جبران سازی نامتعادلی ولتاژ در ریز شبکه با ژنراتور سنکرون مجازی راهنمای جامع نصب دزدگیر پراید راهنمای جامع طبقه بندی فیوزها راهنمای جامع سیم پیچی دینام راهنمای جامع ساخت لامپ راهنمای جامع دزدگیر راهنمای جامع کیفیت توان برق راهنمای جامع نقشه خوانی برق صنعتی راهنمای جامع سنسورهای حرارتی راهنمای جامع تست الکترونیک راهنمای جامع الکترونیک عمومی راهنمای جامع اصطلاحات الکترونیکی راهنمای جامع تعمیر لامپ کم مصرف راهنمای جامع خازن ها - درک کامل اصول، کاربردها و انواع راهنمای جامع تبدیل واحدهای الکتریکی راهنمای جامع ایمنی در برق راهنمای جامع تعمیر نور و چراغ معابر راهنمای جامع نصب کابل برق شبیه سازی شبکه HVDC پاورپوینت گیاه جینکو بیلوبا بررسی و مطالعه طراحی باتری شارژرهای صنعتی دانلود شبیه سازی یکسوساز تک فاز تمام موج تریستوریپر بازدید ترین های فورکیا
 آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو آموزش كامل تعمير لامپ كم مصرف(اختصاصي)
آموزش كامل تعمير لامپ كم مصرف(اختصاصي) دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت
دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت مجموعه آموزشی میکروکنترلر AVR به همراه 20 پروژه کاربردی به زبان ساده بیسکام
مجموعه آموزشی میکروکنترلر AVR به همراه 20 پروژه کاربردی به زبان ساده بیسکام دانلود پاورپوینت سمینار برق قدرت-بررسی خطوط انتقال HVDC
دانلود پاورپوینت سمینار برق قدرت-بررسی خطوط انتقال HVDC دانلود رايگان گاوصندوق اندرويد
دانلود رايگان گاوصندوق اندرويد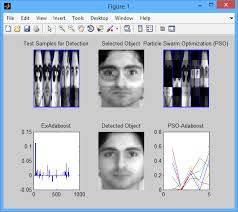 دانلود فایل آموزش پردازش تصویر در MATLAB به همراه فایل شبیه سازی
دانلود فایل آموزش پردازش تصویر در MATLAB به همراه فایل شبیه سازی The Digital Signal Processing Handbook
The Digital Signal Processing Handbook چگونه دو تا کامپیوتر را با هم شبکه کنیم؟
چگونه دو تا کامپیوتر را با هم شبکه کنیم؟ دانلود جزوه ترانسفورماتور-طرح 18 ماهه ایران و آلمان
دانلود جزوه ترانسفورماتور-طرح 18 ماهه ایران و آلمان 100 مدار الكترونيكي به زبان فارسي همراه نقشه مدار ها و توضيح قابل ساخت در خانه حتما ببينيد براي اولين بار در فضاي مجازي
100 مدار الكترونيكي به زبان فارسي همراه نقشه مدار ها و توضيح قابل ساخت در خانه حتما ببينيد براي اولين بار در فضاي مجازي آموزش راه اندازی ماژول GPS با آردوینو
آموزش راه اندازی ماژول GPS با آردوینو آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو الکترونیک صنعتی رشید-ترجمه فارسی
الکترونیک صنعتی رشید-ترجمه فارسی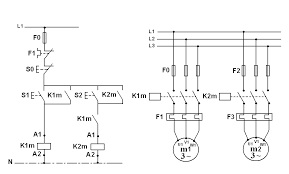 دانلود بسته کامل مدار فرمان
دانلود بسته کامل مدار فرمان مدار اینورتر 100 آمپری جهت جوشکاری
مدار اینورتر 100 آمپری جهت جوشکاری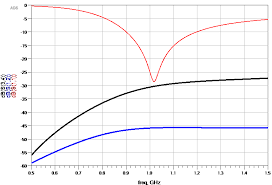 طراحی تقویت کننده کم نویز (#LNA) با نرم افزار ads# برای باند فرکانسی L
طراحی تقویت کننده کم نویز (#LNA) با نرم افزار ads# برای باند فرکانسی L دانلود پویانمایی نیروگاه اصفهان
دانلود پویانمایی نیروگاه اصفهان روش نصب آیفون تصویری
روش نصب آیفون تصویری آموزش استفاده از نرم افزار HD-2013 و طریقه انتقال متن جدید به تابلو
آموزش استفاده از نرم افزار HD-2013 و طریقه انتقال متن جدید به تابلو دیکشنری تخصصی رشته برق مخصوص اندروید
دیکشنری تخصصی رشته برق مخصوص اندروید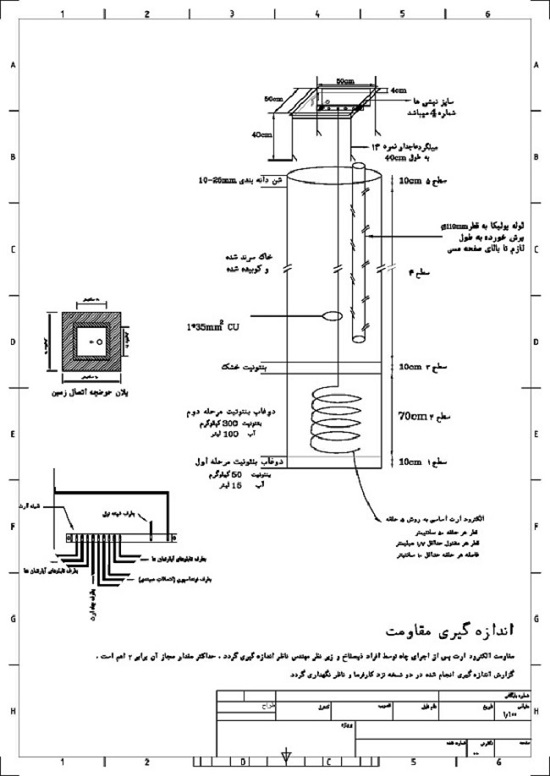 جزییات چاه ارت حلقه ای
جزییات چاه ارت حلقه ای دانلود پاورپوینت آموزش شبيه سازي با Arena
دانلود پاورپوینت آموزش شبيه سازي با Arena دانلود پاورپوینت سمینارD-FACTs (ادوات FACTs شبکه توزیع)
دانلود پاورپوینت سمینارD-FACTs (ادوات FACTs شبکه توزیع) آموزش ساخت مدار تقويت آنتن
آموزش ساخت مدار تقويت آنتن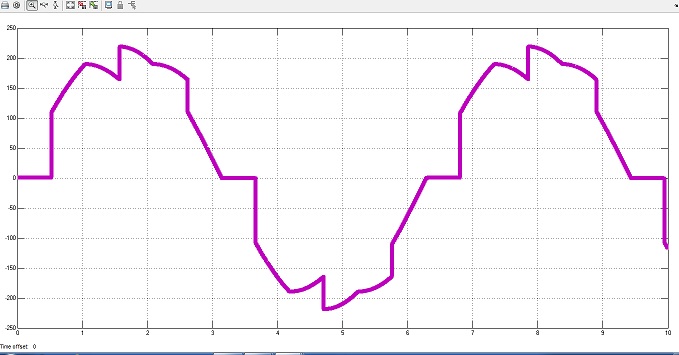 دانلود پروژه الکترونیک صنعتی-مدارات یکسوساز گرتز، برشگر،اینورتر و چاپر
دانلود پروژه الکترونیک صنعتی-مدارات یکسوساز گرتز، برشگر،اینورتر و چاپر کتاب مدارهای میکرو الکترونیک سدرا اسمیت (ترجمه فارسی)
کتاب مدارهای میکرو الکترونیک سدرا اسمیت (ترجمه فارسی)مطالب تصادفی













