



امروز سه شنبه ۱۷ تیر ۱۴۰۴
دسته بندی سایت
پیوند ها
آمار بازدید سایت
در این مقاله قصد داریم تا یک PID کنترلر را گام به گام با استفاده ار بلوک های انتگرال گیر و مشتق گیر در سیمولینک متلب ایجاد کرده و خروجی نهایی آن را با خروج بلوک آماده در متلب مقایسه نماییم.
مقدمه
کنترل کننده های PID برای سیستم های حلقه بسته SISO استفاده می شود. این کنترلر با اعمال تناسبی و انتگرالی و مشتقی بر روی سیگنال خطا سعی در کنتر خروجی یک دستگاه میکند. در ادامه با استفاده از نرم افزار سیمولینک متلب سعی در پیاده سازی گام به گام یه کنترل کننده PID خواهیم کرد. بلوک PID را با اجزای مانند گین، انتگرال گیر و مشتق گیر ایجاد کرده و در نهایت رفتار آن را با بلوک PID آماده خود نرم افزار متلب مقایسه خواهیم کرد. تا صحت مفهومی را که بررسی کردیم اثبات نماییم.
کنترل کننده تناسبی
در شکل زیر ماشین ما با رفتار Gain1 می باشد که با استفاده از اعمال یک ضریب بر روی سیگنال خطا، سعی در کنترل خروجی آن شده است. در این سیستم ، خروجی کنترل کننده، ضریبی از خطای سیستم می باشد.

۱: کنترل کننده تناسبی
پاسخ شبیه سازی کنترلر تناسبی بالا به ورودی پله از قرار زیر است:

۲: پاسخ کنترل کننده تناسبی به ورودی پله
رنگ زرد سیگنال ورودی و رنگ صورتی خروجی می باشد. عملکرد عالی در کنترل دارد ولی در خروجی خطای ماندگار مشاهده می شود.
نکته: فایل شبیه سازی این کنترل کننده در فولدر P Controler ضمیمه شده است که باید با سیمولنک متلب اجرا شود. فایل در پایین صفحه قابل دانلود می باشد.
کنترل کننده انتگرالی
در شکل زیر ماشین ما با رفتار Derivative می باشد که با استفاده از اعمال یک انتگرال بر روی سیگنال خطا، سعی در کنترل خروجی آن شده است. در این سیستم ، خروجی کنترل کننده، انتگرال خطای سیستم می باشد.

۳: کنترل کننده انتگرالی
پاسخ شبیه سازی کنترلر انتگرالی بالا به ورودی پله از قرار زیر است:

۴: پاسخ کنترل کننده انتگرالی به ورودی پله
رنگ زرد سیگنال ورودی و رنگ صورتی خروجی می باشد
نکته: فایل شبیه سازی این کنترل کننده در فولدر I Controler ضمیمه شده است که باید با سیمولنک متلب اجرا شود. فایل در پایین صفحه قابل دانلود می باشد.
کنترل کننده مشتق گیر
در شکل زیر ماشین ما با رفتار ۱/S می باشد که با استفاده از اعمال یک مشتق بر روی سیگنال خطا، سعی در کنترل خروجی آن شده است. در این سیستم ، خروجی کنترل کننده، مشتق خطای سیستم می باشد.

۵: کنترل کننده مشتق گیر
پاسخ شبیه سازی کنترلر مشتق گیر بالا به ورودی پله از قرار زیر است:

۶: پاسخ کنترل کننده مشتق گیر به ورودی پله
رنگ زرد سیگنال ورودی و رنگ صورتی خروجی می باشد. این کنترل کننده به تنهایی استفاده نمی شود.
نکته: فایل شبیه سازی این کنترل کننده در فولدر D Controler ضمیمه شده است که باید با سیمولنک متلب اجرا شود. فایل در پایین صفحه قابل دانلود می باشد.
کنترل کننده PI
این کنترل کننده را کنترل کننده تناسبی، انتگرالی می گویند. در شکل زیر ماشین ما با رفتار Derivative می باشد که با استفاده از اعمال ضریب تناسبی و انتگرال بر روی سیگنال خطا، سعی در کنترل خروجی آن شده است.

۷: کنترل کننده PI
پاسخ شبیه سازی کنترلر PI بالا به ورودی پله از قرار زیر است:

۸: پاسخ کنترل کننده PI به ورودی پله
رنگ زرد سیگنال ورودی و رنگ صورتی خروجی می باشد .
نکته: فایل شبیه سازی این کنترل کننده در فولدر PI Controler ضمیمه شده است که باید با سیمولنک متلب اجرا شود. فایل در پایین صفحه قابل دانلود می باشد.
کنترل کننده PI بالا با مقادیر Kp=1 و Ki=20 عملکرد خیلی خوبی از خود نشان داد.

۹: پاسخ کنترل کننده PI برای ضرایب مناسب
کنترل کننده PD
این کنترل کننده را کنترل کننده تناسبی، مشتقی می گویند. در شکل زیر ماشین ما با رفتار Intearator می باشد که با استفاده از اعمال ضریب تناسبی و مشتق بر روی سیگنال خطا، سعی در کنترل خروجی آن شده است.

۱۰: کنترل کننده PD
پاسخ شبیه سازی کنترلر PD بالا به ورودی پله از قرار زیر است:

۱۱: پاسخ کنترل کننده PD به ورودی پله
رنگ زرد سیگنال ورودی و رنگ صورتی خروجی می باشد .
نکته: فایل شبیه سازی این کنترل کننده در فولدر PD Controler ضمیمه شده است که باید با سیمولنک متلب اجرا شود. فایل در پایین صفحه قابل دانلود می باشد.
کنترل کننده PD بالا با مقادیر Kp=2 و Kd=0.5 عملکرد خیلی خوبی از خود نشان داد.

۱۲: پاسخ کنترل کننده PD به ورودی پله با ضرایب مناسب
کنترل کننده PID
این کنترل کننده را کنترل کننده تناسبی، انتگرالی و مشتقی می گویند. در شکل زیر ماشین ما با رفتار (S+5)/(S(S+1)(S+2) می باشد که با استفاده از اعمال ضریب تناسبی، انتگرال و مشتق بر روی سیگنال خطا، سعی در کنترل خروجی آن شده است.

۱۳: کنترل کننده PID
پاسخ شبیه سازی کنترلر PID بالا به ورودی پله از قرار زیر است:

۱۴: پاسخ کنترل کننده PID به ورودی پله
رنگ زرد سیگنال ورودی و رنگ صورتی خروجی می باشد . سیستم بعد از گذشت زمان ۱۸ ثانیه به خروجی مطلوب رسید.
نکته: فایل شبیه سازی این کنترل کننده در فولدر PID Controler_1 ضمیمه شده است که باید با سیمولنک متلب اجرا شود. فایل در پایین صفحه قابل دانلود می باشد.
کنترل کننده PD بالا با مقادیر Kp=10 و Ki=10 و Kd=2 عملکرد خیلی خوبی از خود نشان داد. سیستم بعد از گذشت زمان ۹ ثانیه به خروجی مطلوب رسید.

۱۵: پاسخ کنترل کننده PID به ورودی پله با ضرایب اصلاح شده
استفاده از بلوک آماده PID در نرم افزار متلب
برای راحتی کاربران، در نرم افزار متلب بلوک آماده PID کنترلر وجود دارد که باعث افزایش سرعت کار می شود. در شکل زیر اجرای شبیه سازی را با بلوک آماده PID مشاهده میکنید:

۱۶: کنترل کننده PID
برای تنظیم ضرایب PID باید بر روی بلوک PID دابل کلیک کرده و در پنجره باز شده مقادیر را تنظیم نمود. پاسخ شبیه سازی کنترلر PID بالا به ورودی پله با مقادیر Kp=10 و Ki=10 و Kd=2 از قرار زیر است:

۱۷: شبیه سازی کنترل کننده PID با بلوک آماده نرم افزار متلب
رنگ زرد سیگنال ورودی و رنگ صورتی خروجی می باشد . سیستم بعد از گذشت زمان ۹ ثانیه به خروجی مطلوب رسید.
نکته: فایل شبیه سازی این کنترل کننده در فولدر PID Controler_2 ضمیمه شده است که باید با سیمولنک متلب اجرا شود. فایل در پایین صفحه قابل دانلود می باشد.
نتیجه گیری
برای پیاده سازی یک کنترل کننده PID تلاش ما به طراحی شکل ۱۳ ختم شد. یک کنترل کننده که با اعمال ضریب تناسبی و انتگرال و مشتق بر روی سیگنال خطا قادر به کنترل خروجی در زمان مناسب بود. که شکل خروجی سیگنال با ضرایب اصلاح شده در شکل ۱۵ مشخص است. این خروجی را اگر با شکل ۱۷ که خروجی بلوک آماده PID کنترل نرم افزار متلب است مقایسه شود متوجه خواهیم شد که خروجی هر دو بلوک مشابه هم می باشد. بنابر این مفهومی که برای دست یابی به یک کنترل کننده PID در پیش گرفته بودیم درست بود. و در صورت پیاده سازی این مفهوم بر روی فرایند های فیزیکی مانند کنترل دور موتور و … می توان انتظار یک سیستم با خروجی مطلوب را داشت.
جهت دانلود فایل های ضمیمه این مقاله آموزشی اینجا کلیک کنید. (۳۹KB)
تهیه و تنظیم: علی رضا جودی
لینک منبع:
خواننده گرامی: برای تهیه هر یک از این مقالات زمان ، انرژی و هزینه بسیار زیادی صرف می شود. در حق ما لطف نموده و مطالب را بدون هیچ تغییر و با ذکر منبع انتشار دهید. رعایت کپی رایت باعث انگیزه و امید تولید کننده های مطالب آموزشی میشود. با سپاس از خوانندگان محترم و با امید به روزهای بهتر
جزوه سیستمهای دیجیتال 1 برای دانلود دانشگاه: صنعتی همدان استاد: مهندس دوست محمدی فرمت: PDF پی دی اف کیفیت: بسیار عالی تعداد صفحات: 108 حجم: 33.7 مگابایت رشته: مهندسی برق دانلود نمونه ...

عنوان پاورپوینت:دانلود پاورپوینت فرش ایران در دوره صفویهفرمت: پاورپوینت قابل ویرایشتعداد اسلاید: 44تم زیبا و متناسب با موضوعپاورپوینت کامل و آماده ارائهفهرست مطالب:چکیدهدوره های فرشبافی عصر صفویهصفو یه که بود ؟ از کجا آمدقالي بافي در عصر صفويه طرح ترنج دار قالي موج دريا ... ...
جزوه مدارهای الکتریکی 1 آماده برای دانلود مشخصات دانشگاه: صنعتی جندی شاپور استاد: سعید وحدت پناه سال: 96 تعداد صفحات: 262 فرمت: پی دی اف PDF کیفیت: عالی حجم: 7 مگابایت نوع جزوه (تایپی یا دست نویس): تایپی با عکس ... ...
اگر به یک وب سایت یا فروشگاه رایگان با فضای نامحدود و امکانات فراوان نیاز دارید بی درنگ دکمه زیر را کلیک نمایید.
ایجاد وب سایت یامحبوب ترین ها
پرفروش ترین ها
پر فروش ترین های فورکیا
پر بازدید ترین های فورکیا
 آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو آموزش كامل تعمير لامپ كم مصرف(اختصاصي)
آموزش كامل تعمير لامپ كم مصرف(اختصاصي) دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت
دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت مجموعه آموزشی میکروکنترلر AVR به همراه 20 پروژه کاربردی به زبان ساده بیسکام
مجموعه آموزشی میکروکنترلر AVR به همراه 20 پروژه کاربردی به زبان ساده بیسکام دانلود پاورپوینت سمینار برق قدرت-بررسی خطوط انتقال HVDC
دانلود پاورپوینت سمینار برق قدرت-بررسی خطوط انتقال HVDC دانلود رايگان گاوصندوق اندرويد
دانلود رايگان گاوصندوق اندرويد The Digital Signal Processing Handbook
The Digital Signal Processing Handbook دانلود فایل آموزش پردازش تصویر در MATLAB به همراه فایل شبیه سازی
دانلود فایل آموزش پردازش تصویر در MATLAB به همراه فایل شبیه سازی چگونه دو تا کامپیوتر را با هم شبکه کنیم؟
چگونه دو تا کامپیوتر را با هم شبکه کنیم؟ دانلود جزوه ترانسفورماتور-طرح 18 ماهه ایران و آلمان
دانلود جزوه ترانسفورماتور-طرح 18 ماهه ایران و آلمان 100 مدار الكترونيكي به زبان فارسي همراه نقشه مدار ها و توضيح قابل ساخت در خانه حتما ببينيد براي اولين بار در فضاي مجازي
100 مدار الكترونيكي به زبان فارسي همراه نقشه مدار ها و توضيح قابل ساخت در خانه حتما ببينيد براي اولين بار در فضاي مجازي آموزش راه اندازی ماژول GPS با آردوینو
آموزش راه اندازی ماژول GPS با آردوینو آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو الکترونیک صنعتی رشید-ترجمه فارسی
الکترونیک صنعتی رشید-ترجمه فارسی مدار اینورتر 100 آمپری جهت جوشکاری
مدار اینورتر 100 آمپری جهت جوشکاری دانلود بسته کامل مدار فرمان
دانلود بسته کامل مدار فرمان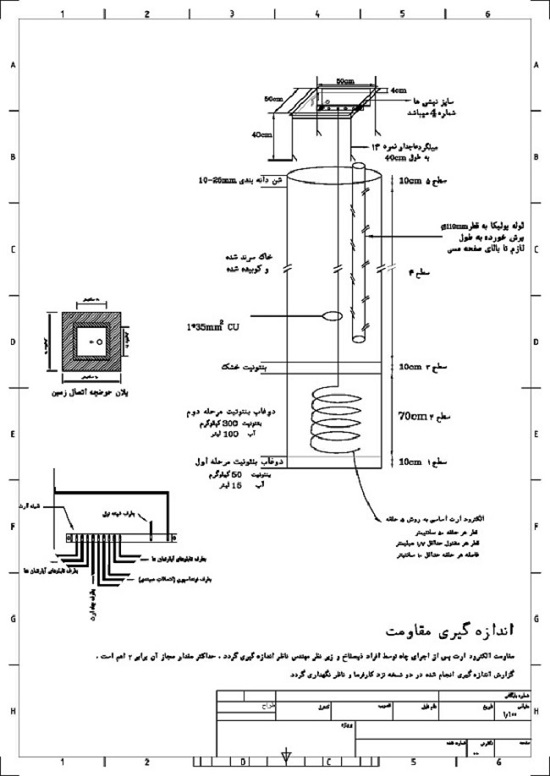 جزییات چاه ارت حلقه ای
جزییات چاه ارت حلقه ای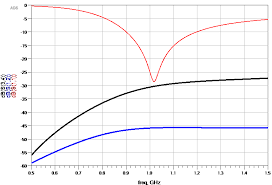 طراحی تقویت کننده کم نویز (#LNA) با نرم افزار ads# برای باند فرکانسی L
طراحی تقویت کننده کم نویز (#LNA) با نرم افزار ads# برای باند فرکانسی L آموزش ساخت مدار تقويت آنتن
آموزش ساخت مدار تقويت آنتن دانلود پویانمایی نیروگاه اصفهان
دانلود پویانمایی نیروگاه اصفهان روش نصب آیفون تصویری
روش نصب آیفون تصویری دانلود پاورپوینت سمینارD-FACTs (ادوات FACTs شبکه توزیع)
دانلود پاورپوینت سمینارD-FACTs (ادوات FACTs شبکه توزیع) دانلود پاورپوینت آموزش شبيه سازي با Arena
دانلود پاورپوینت آموزش شبيه سازي با Arena دیکشنری تخصصی رشته برق مخصوص اندروید
دیکشنری تخصصی رشته برق مخصوص اندروید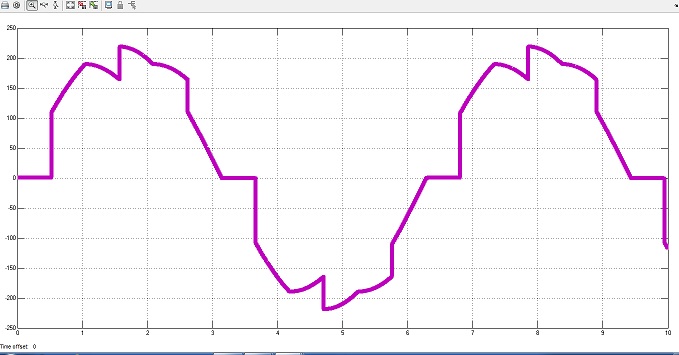 دانلود پروژه الکترونیک صنعتی-مدارات یکسوساز گرتز، برشگر،اینورتر و چاپر
دانلود پروژه الکترونیک صنعتی-مدارات یکسوساز گرتز، برشگر،اینورتر و چاپر کتاب مدارهای میکرو الکترونیک سدرا اسمیت (ترجمه فارسی)
کتاب مدارهای میکرو الکترونیک سدرا اسمیت (ترجمه فارسی)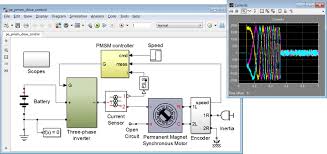 دانلود آموزش شبیه سازی سیستم قدرت در matlab
دانلود آموزش شبیه سازی سیستم قدرت در matlabمطالب تصادفی




